Today, software is eating the world and disrupting manufacturing production models and product forms. With industrial transformation, more manufacturing enterprises are leveraging industrial software for product innovation, driving smart manufacturing transformation through flexible production.
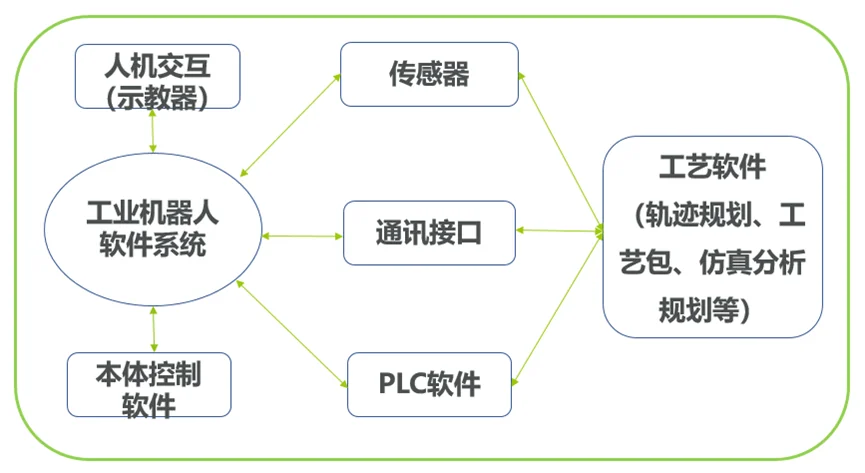
Industrial robot software systems are the core technology of smart manufacturing. The composition of industrial robot software is shown below, with trajectory planning and simulation CAM software being the most critical technology.
The Evolution of Robot Trajectory Planning:
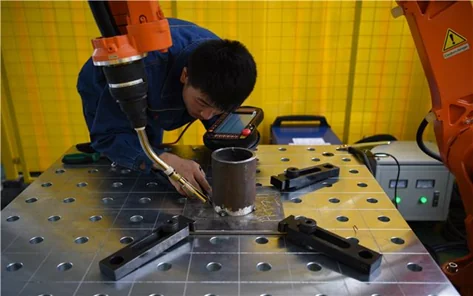
First Generation — Manual Teach Programming (1960s – Present)
Manual teach programming is completed by the industrial robot's motion controller's built-in software. An operator holds a teach pendant, visually judges positions, and manually records waypoints to obtain machining trajectories. This is the most common programming method, accounting for approximately 70% of all programming. Advantages include convenience and immediacy, making it well-suited for simple point-to-point machining. However, the disadvantages are also obvious:
* Tedious teach programming process;
* Accuracy depends entirely on the operator's visual judgment — difficult to achieve satisfactory results for complex paths;
* Teaching process carries risk of accidents — minor equipment damage or serious personal injury;
* Too many types of teach pendants create excessive learning burden;
* Occupies effective robot working hours, resulting in very low efficiency;
* Many robot application environments are harsh, unsuitable for on-site teach programming.
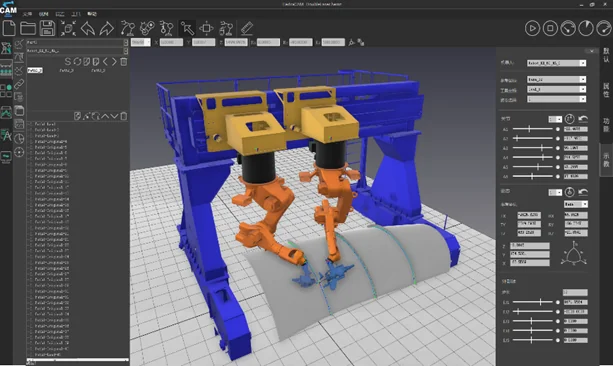
Second Generation — 3D Offline Programming (1990s – Present)
3D offline programming uses CAD graphics to build 3D scenes of robots and their work environments, then uses planning algorithms to perform trajectory planning on computers through control and manipulation of machined product 3D graphics. Programming results undergo 3D virtual simulation to verify correctness before post-processors transmit generated code to robot controllers to complete planned tasks.
Robot offline programming software has over 30 years of development history internationally. Commercial products fall mainly into two categories: first, those developed by major foreign robot manufacturers, such as ABB's RobotStudio, FANUC's RobotGuide, Yaskawa's MotoSim, and KUKA's SimPro; second, third-party software from professional CAD/CAM companies, such as Siemens' Tecnomatix, Dassault's DELMIA IGRIP, Robotmaster, and Fastsuite. The domestic robot offline programming enterprise market has been completely monopolized by foreign products for many years. Currently, the only mature domestic commercial software widely deployed in enterprises is our company's HedraCAM Robot OLP.
Currently, offline programming software promotion domestically has not been ideal. Existing customers generally experience poor application results, many have abandoned it, and new customer purchasing意愿 is weak. The main reasons are three common problems found in both domestic and foreign software:
* Offline programming has high requirements for the application environment, resulting in programs lacking adaptive capability;
* Low intelligence level, still relatively inefficient;
* Requires hiring professional CAM programming engineers — cost is too high.
Third Generation — Intelligent AI Automatic Programming (2019 – Present)
Through years of R&D, Trustrobot Software has developed the third-generation AI-based intelligent programming and simulation solution HedraCAM AI In, built on the foundation of HedraCAM OLP technology using a combined approach of 'front-end rapid external data processing + back-end reinforcement learning.' It achieves unattended generation of robot teach-free 3D operation programs. Intelligent programming primarily targets small-batch or single-piece production. Currently, various solutions have been developed through落地 projects, differing in data acquisition hardware, corresponding process workflows, and target industries and products.
Specific Steps:
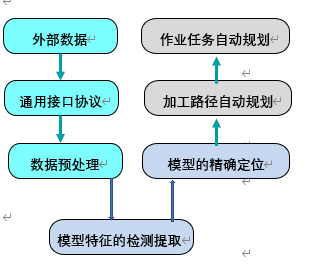
Step 1 — Front-end External Data:
External data includes 3D CAD files output from NX, SolidWorks, Tekla, Revit, etc.; JSON weld seam files; or various data obtained from radar, binocular vision cameras, 3D scanning devices, handheld teach pens, or teleoperation handles (such as point cloud files txt, stl meshes, etc.).
Step 2 — Rapid Data Processing and Positioning:
Through classification, rapid recognition, extraction, and matching of scanned data, workpiece machining features closely related to the actual process workflow (points, lines, surfaces, volumes and other general geometric features) are identified, achieving part marking and precise positioning.
Step 3 — AI Intelligent Processing:
Automatic machining path planning primarily considers automated generation of machining trajectory points, minimum robot posture changes, out-of-limit and ambiguous positions, obstacle avoidance, and external axes. Through AI reinforcement learning, the optimal posture for the robot and external axes is found, and automatic obstacle avoidance training is conducted in the simulation environment.
Step 4 — Back-end Communication:
Through post-processing considering machining process parameter settings and digital twin technology for interconnection with the native controller, machining programs are output to the robot side for automated processing.
HedraCAM AI In software system enables fully autonomous operation. Technicians simply press the Start button to automatically complete all tasks. Processing can be paused at any time for manual parameter adjustments. After programming one part, the system can automatically proceed to program the next, making it particularly suitable for high-volume single-piece automation. It enables 24-hour unattended 'lights-out factory' production, significantly improving enterprise production efficiency.
HedraCAM AI In has been successfully deployed in cutting, welding, spraying, assembly, material handling, polishing, and other fields.