🔑 Key Features
Multi-Brand Support
Supports Hyper, Atlas, Rigel and other mainstream measurement devices; ABB, KUKA, FANUC, Yaskawa and collaborative robots; 5-axis to 6-axis configurations.
Full Format Import
Supports IGES, STEP, STL, DXF and other standard CAD formats; direct point cloud import for path generation.
Kinematics Simulation
Forward and inverse kinematics algorithms; checks reachability, joint limits, and collisions in real time.
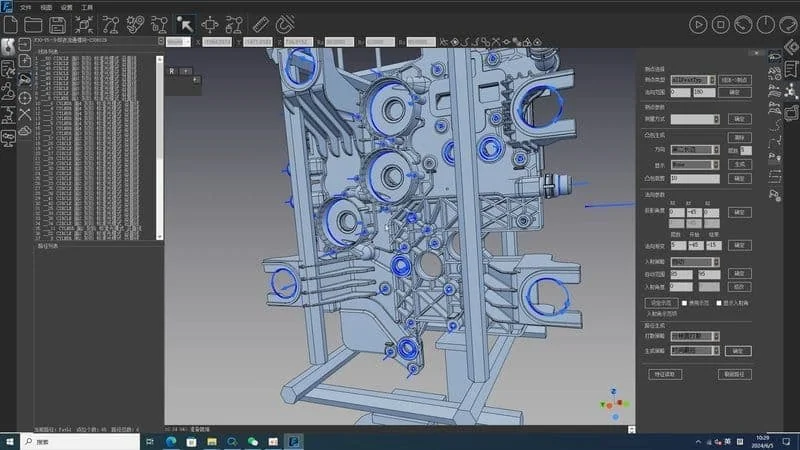
Multiple Measurement Modes
Planar parametric, curved surface parametric, and drag-mode measurement path generation; DIMS file support; external axis auto-added transition points.
Precision Calibration
Single-point and three-point calibration; user/TCP/joint soft-limit input; real-time scene-to-physical matching.
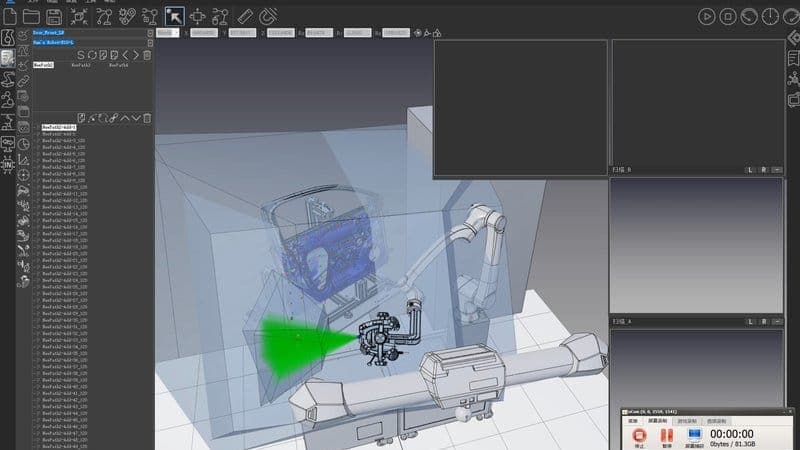
Collision Detection
Collision relationships between two models with auto color alert and simulation stop; external axis coupling for gantry multi-axis setups.
🖥️ Feature Demo
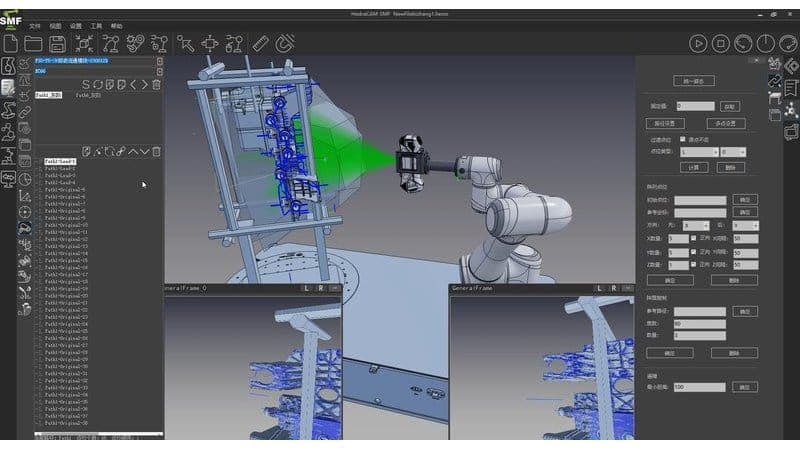
Auto Obstacle Avoidance
Time-Optimal Strategy
Hand-Eye Calibration
Trace Tracking
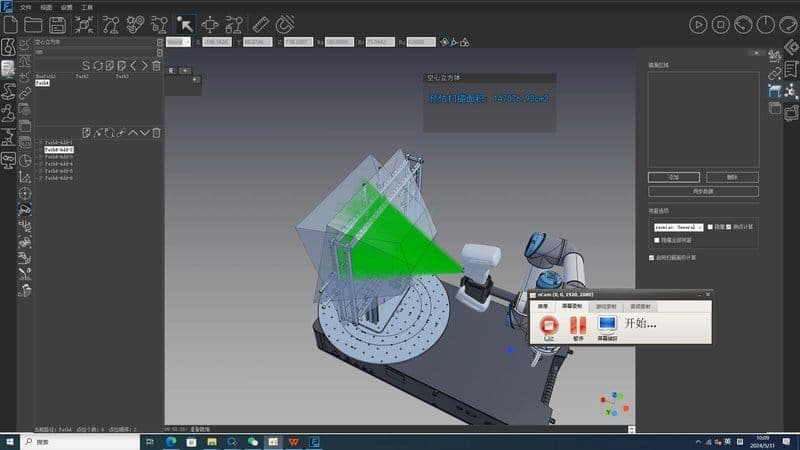
Area Calculation
Rendering
📋 Feature List
① CAD basics: point, line, plane, arc, coordinate system feature snapping
② Quaternion/Euler conversion
③ Path generation: normal, bisector, groove, plane and curve direction
④ Unified pose: scan head consistent posture setting
⑤ Curved surface measurement: hand-held calibration for complex paths
⑥ 7-axis special structure: inner surface measurement path generation
✓ Coverage analysis: scan rate color visualization
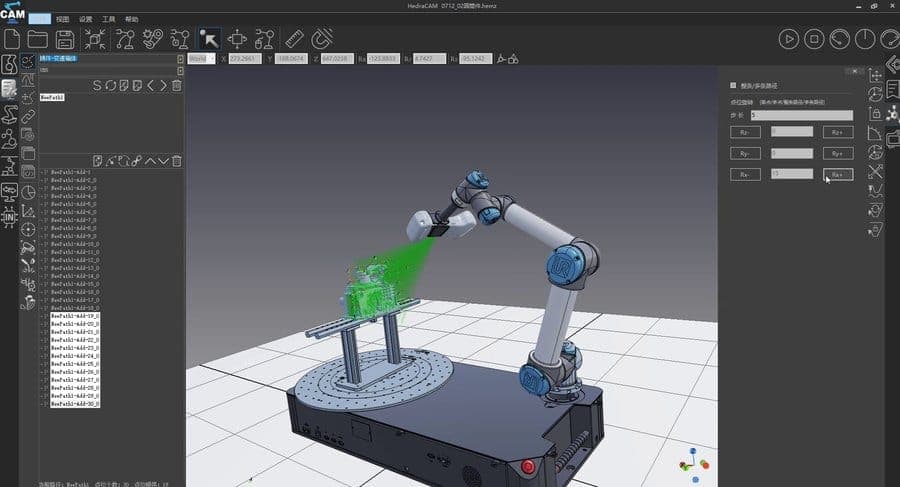
✓ Batch pose adjustment: axis lock, pose gradient, auto-sorting
✓ DXF fixture drawing: auto-generate fixtures and output drawings
✓ Excel process template: custom parameters export
🏭 Application Scenarios
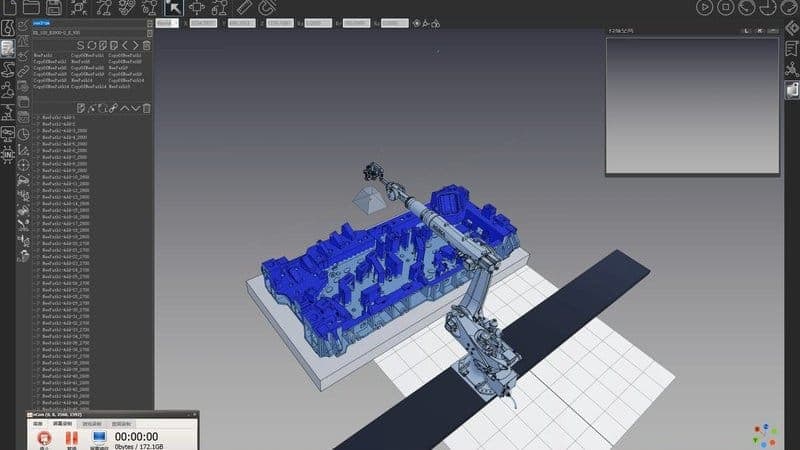
BIW Measurement
Aerospace Inspection
Pre-Welding Alignment
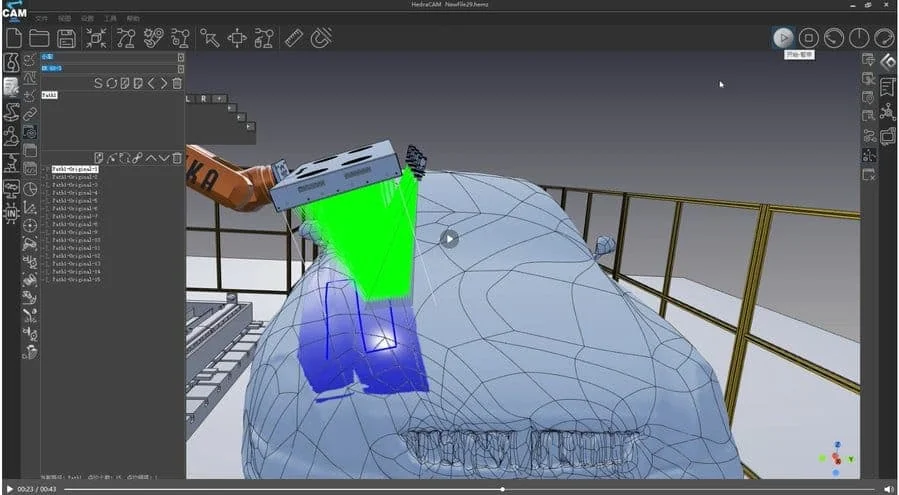
Complex Surface Scanning
Multi-Robot Measurement
Quality Inspection
🏭 Scene Images
Automotive BIW Measurement
Paint Film QC
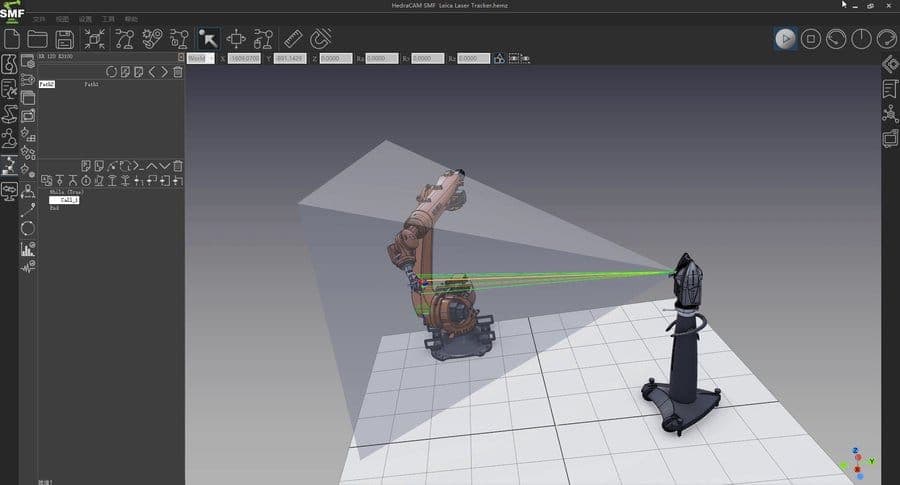
Leica Laser Tracker