The Robot Offline Programming Module (OLP) is the core functional module of the HedraCAM platform, specifically designed for industrial robot programming. Through innovative 2D visual node workflows, intelligent pose optimization algorithms, and physics-level process simulation, complex robot programming tasks are simplified, enabling full-process automation from model import, path planning to simulation verification and code output.
-
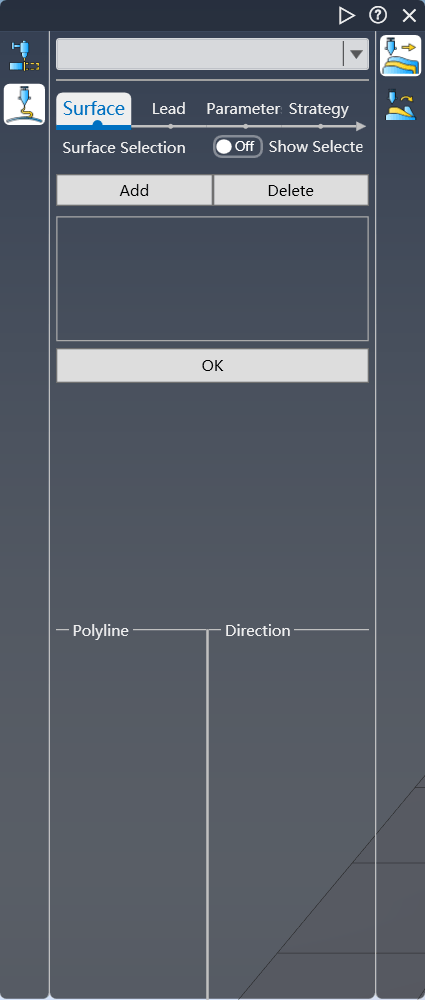
Guided Workflow Operation
Innovative full-process operation architecture breaks down complex programming tasks into standardized 2D visual nodes. From model import, path planning to simulation verification, each step has clear guidance for zero-threshold quick start.
-
Multi-source Data Fusion
Strong underlying compatibility supports Solid, Surface, measurement point data, scanned 3D point clouds and STL meshes. Whether facing original CAD models or reverse engineering data, precise trajectory planning can be achieved.
-
Intelligent Pose Optimization
Built-in automatic pose optimization algorithm detects and avoids singularities, stroke limits and collisions in real-time. Supports interactive curve adjustment tools for local trajectory fine-tuning to ensure safe processing.
-
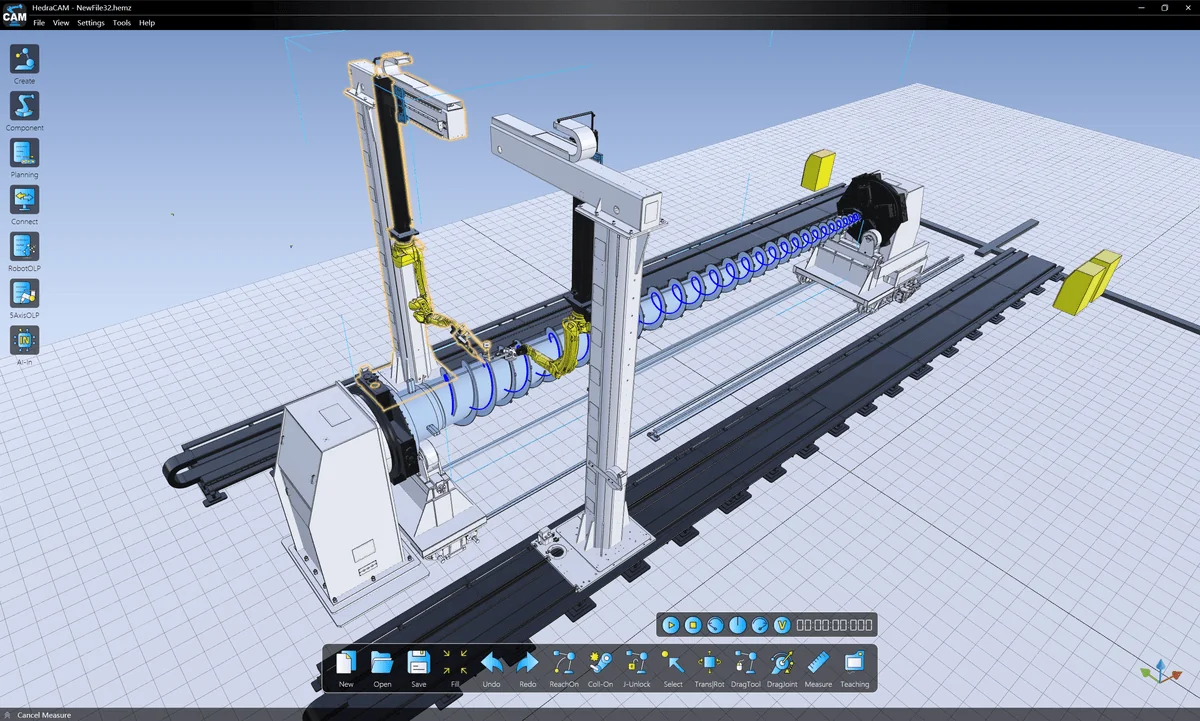
Physics-level Process Simulation
In specific scenarios like scanning, spraying and shot peening, the software provides real-time process rendering effects. Dynamic color changes on workpiece surfaces intuitively show processed and uncovered areas.
2D Visual Node Workflow
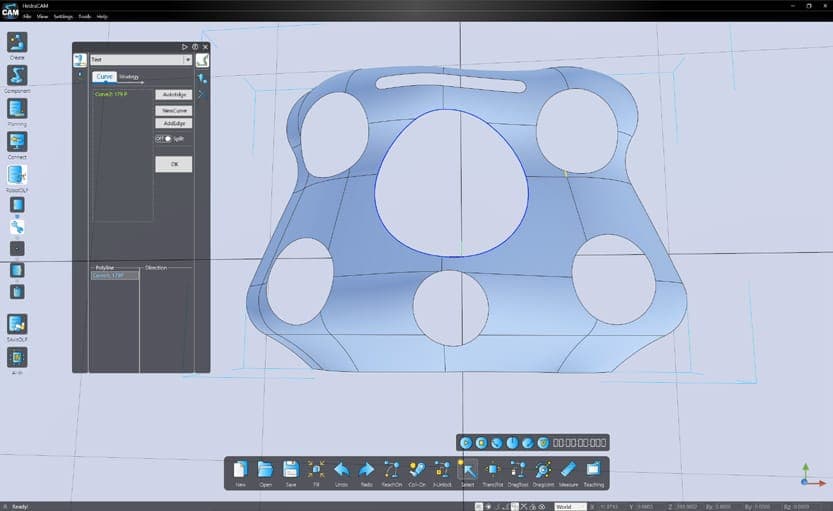
CAD Model Import
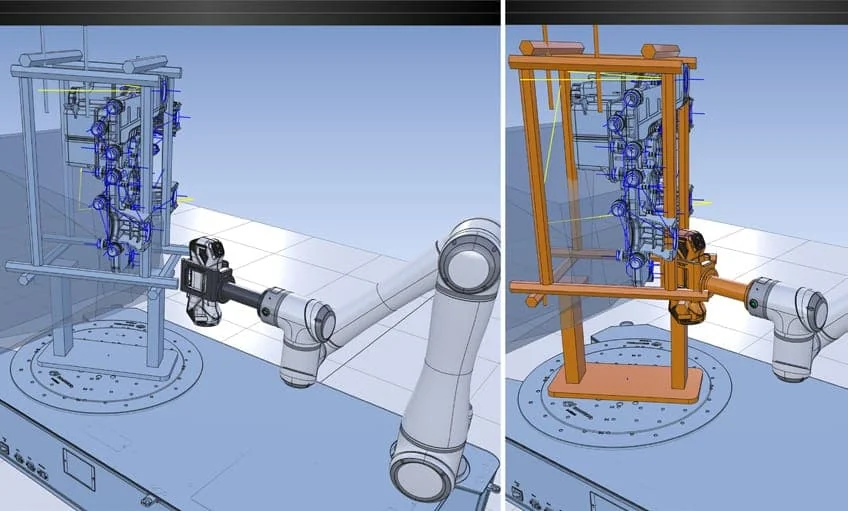
Intelligent Pose Optimization
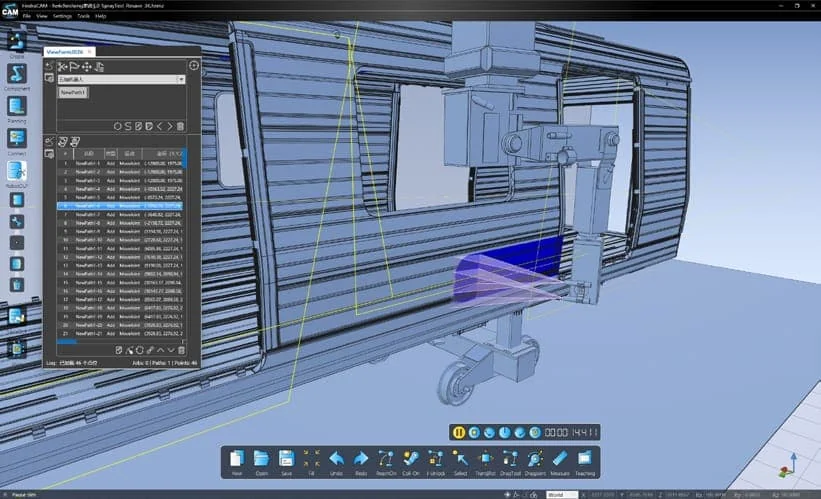
Physics-level Simulation
Multi-source Data Fusion
2D Nodes
Multi-source Data
Pose Optimization
Collision Detection
Process Simulation
-
Multi-robot Collaboration & External Axes
Perfectly adapts to various external axis extensions including rotary tables, linear slides and gantry structures. Supports multi-robot linkage and collaborative processing for complex automated production lines.
-
Industry-wide Process Generalization
Cutting: Sheet metal laser cutting, plasma, tube laser cutting.
Welding & Additive: Laser welding, TIG-MIG hybrid welding, multi-layer welding, 3D printing, cladding repair.
Surface Treatment: Spraying, sand blasting, shot peening, polishing, cleaning, dispensing.
Special Processing: Shaping, engraving, needle punching, blade cleaning, ultrasonic inspection.
Inspection: 3D scanning / precision measurement.
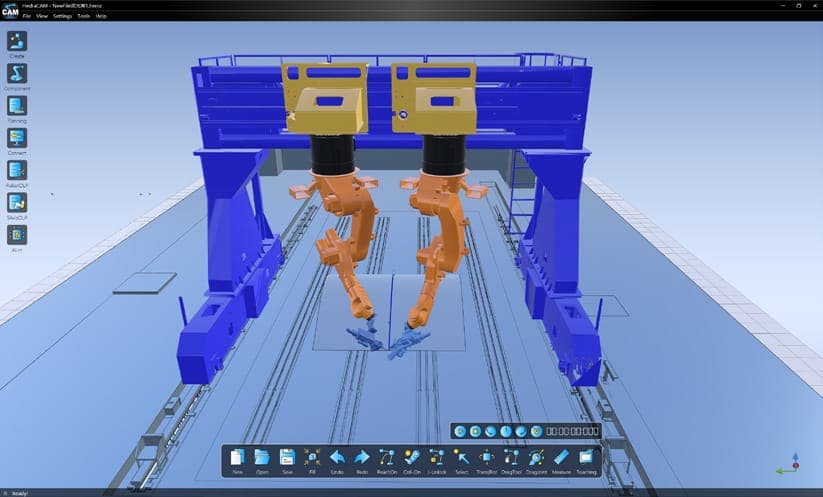
Multi-robot Collaboration
21-Axis Synchronization