The SMF module is a full-lifecycle planning platform for future intelligent manufacturing, ensuring "what you see is what you get" through virtual modeling, equipment simulation, logistics scheduling, and system coordination. Before actual production, through precise simulation analysis and verification, the SMF module covers various stages of industrial intelligence, effectively reducing production line deployment costs and complexity.
-
Full-Factor Layout Optimization
Based on the "human, machine, material, method, environment" information model, comprehensively analyzing working hours and transportation data. Simulating complex smart factory environments, calculating optimal equipment spacing and personnel layout.
-
Takt Analysis and Bottleneck Diagnosis
Automatically counts production takt times and identifies process bottlenecks, presenting operational efficiency through real-time data bar charts. Supports exporting simulation data to upper-level management systems.

Full-Factor Layout Optimization
Layout Optimization
Takt Analysis
Bottleneck Diagnosis
-
Distributed Architecture
Breaking through single-machine hardware limitations, distributing rendering and computing load across multiple nodes, supporting ultra-large production lines.
-
Real-Time Data Synchronization
Based on high-bandwidth networking modules, ensuring operation changes on each terminal can be mapped to the main simulation scenario at millisecond level.
-
Modular Decoupled Modeling
Allows teams to cut scenarios by region or process, with each member focusing on independent modules, achieving seamless merging through central nodes.
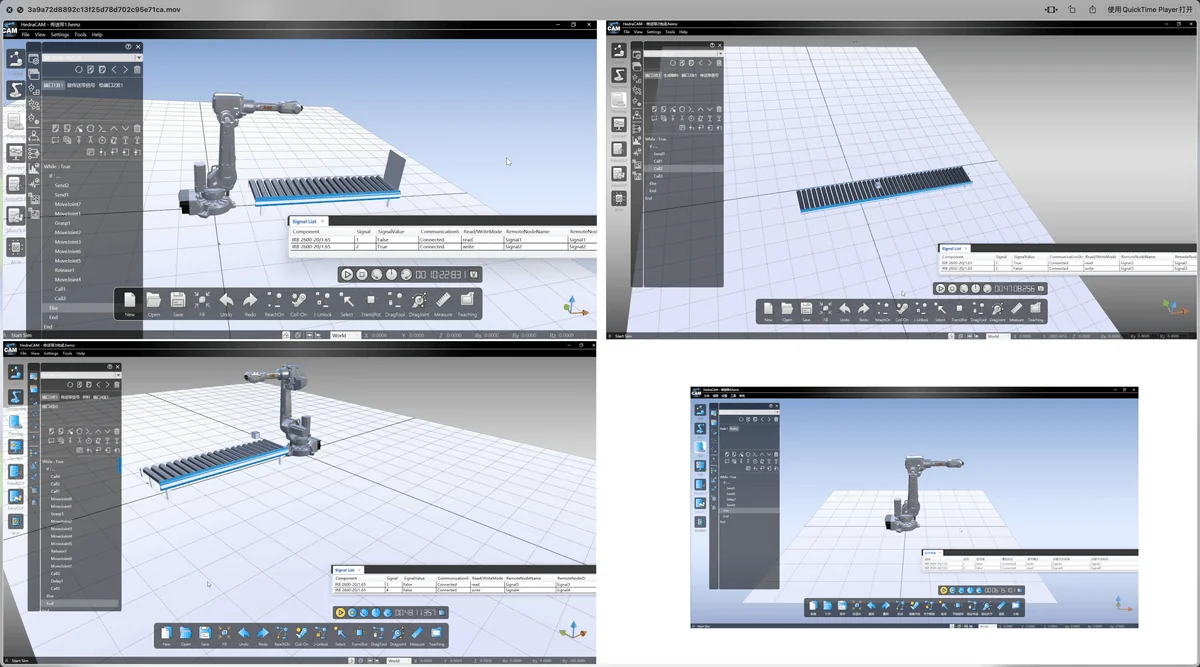
Distributed Multi-Robot Collaboration
Distributed Architecture
Real-Time Sync
Modular Modeling
-
Flexible Custom Production Line Logic
Supports deep configuration of production line signal flows. Users can independently define operating rules, loop statements, and custom variables. Achieve digital simulation of complex logic.
-
Open Motion Algorithm Control
Built-in kinematics structure extension functions. Users can write personalized component behavior logic using Python scripts or system templates.
-
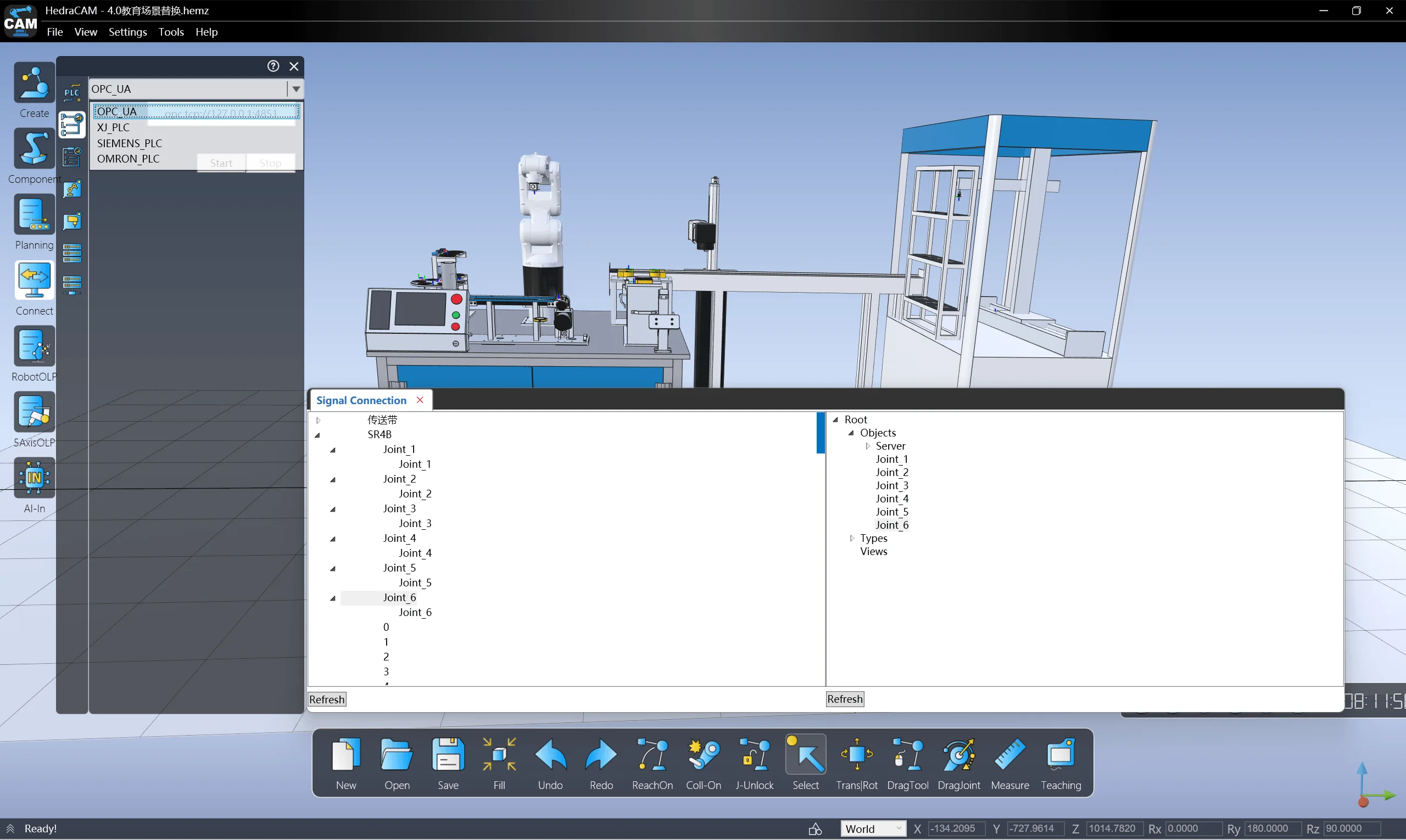
Seamless Hardware-Software Integration
Supports OPC UA standard and real-time PLC communication, enabling direct connection with ABB, KUKA, and other mainstream robot controllers.

Custom Production Line Logic
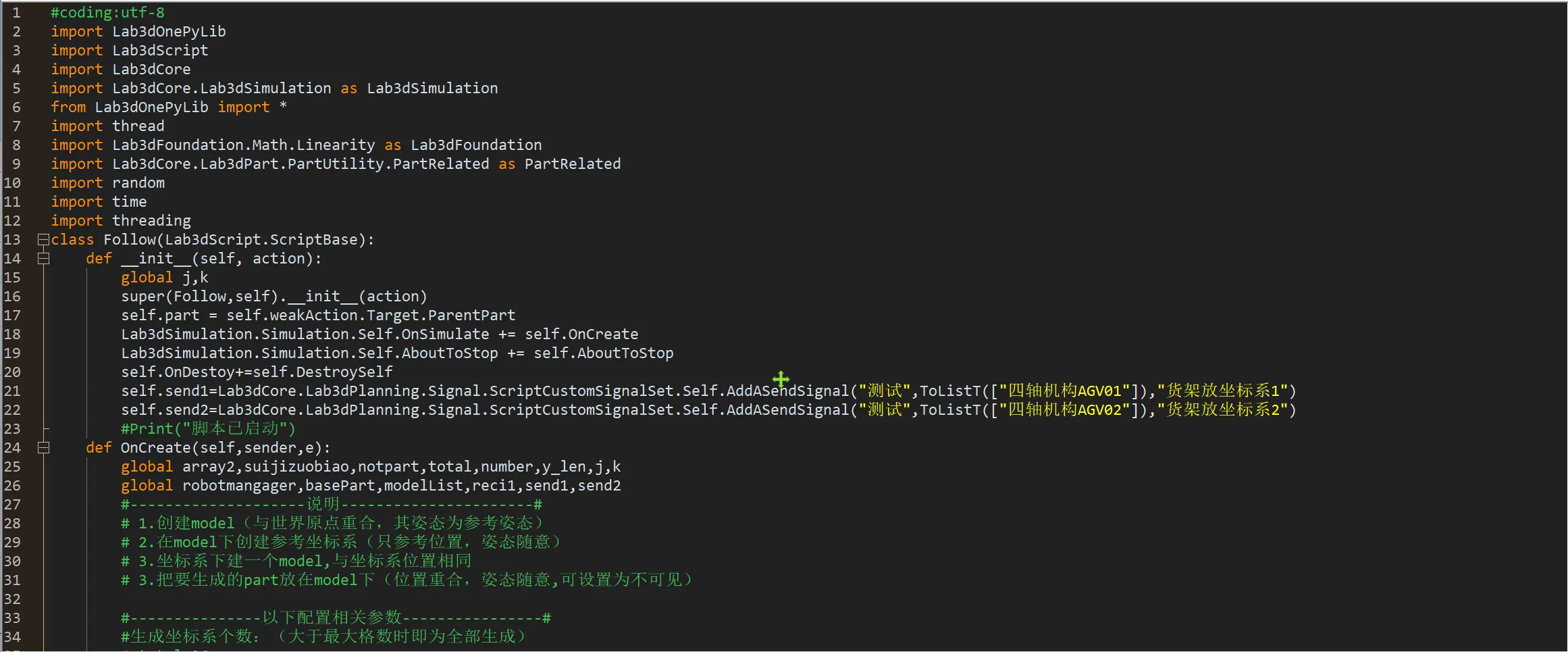
Motion Algorithm Control
Signal Flow
Motion Algorithm
OPC UA
PLC
-
Automatic Collision Detection
Integrating powerful physics simulation engine and PBR rendering technology, supporting realistic physical collision detection. Testing robot reachability in fully realistic virtual environment.
-
Intelligent Palletizing/De-Palletizing
Through parametric setting of stacking/de-stacking intervals, only setting the start trajectory can achieve fully automatic simulation planning.
-
Tool Head Quick-Change Simulation
Built-in end-effector quick-change module, accurately reproducing the tool switching process in real production lines.
High-Fidelity Physics Engine
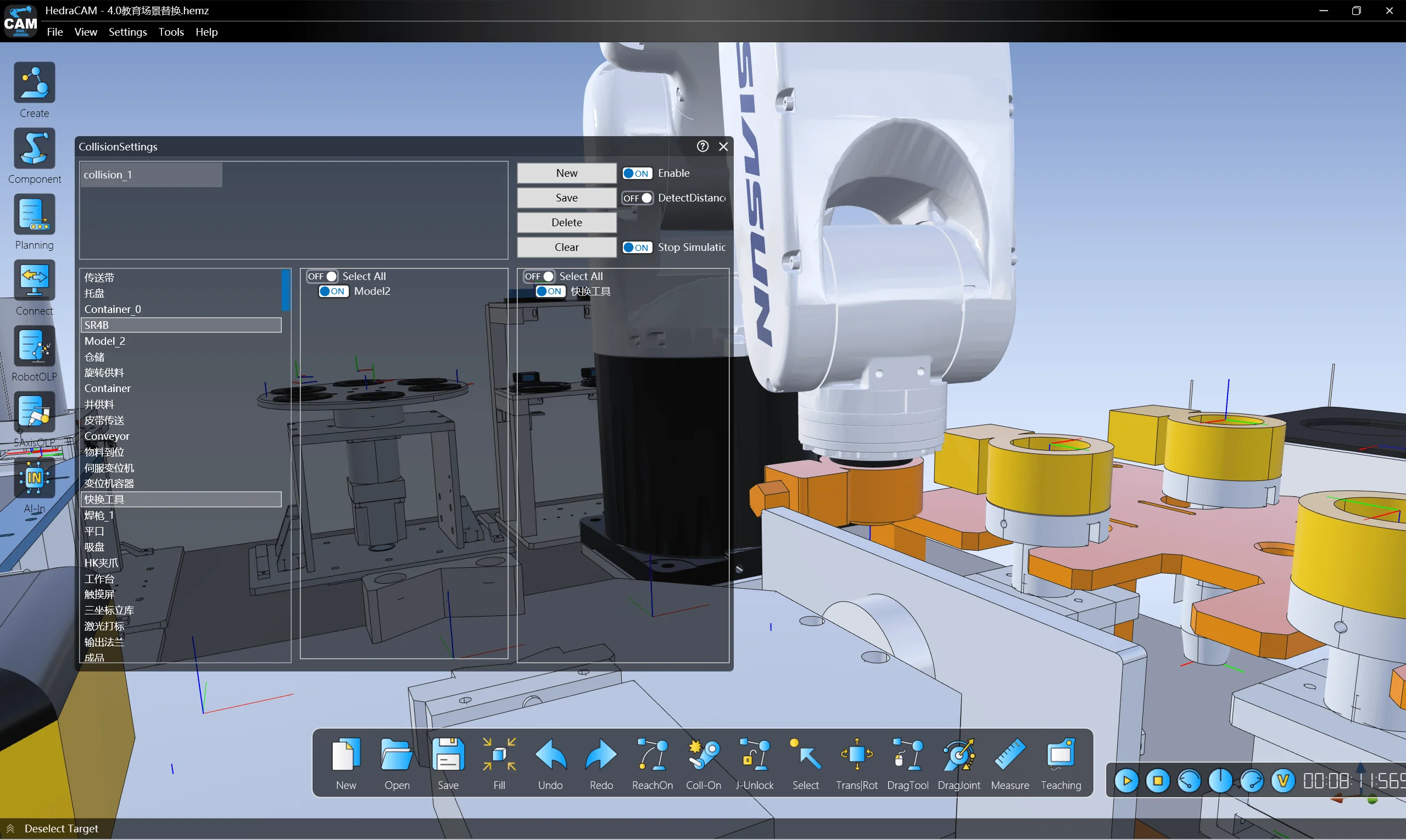
Automatic Collision Detection
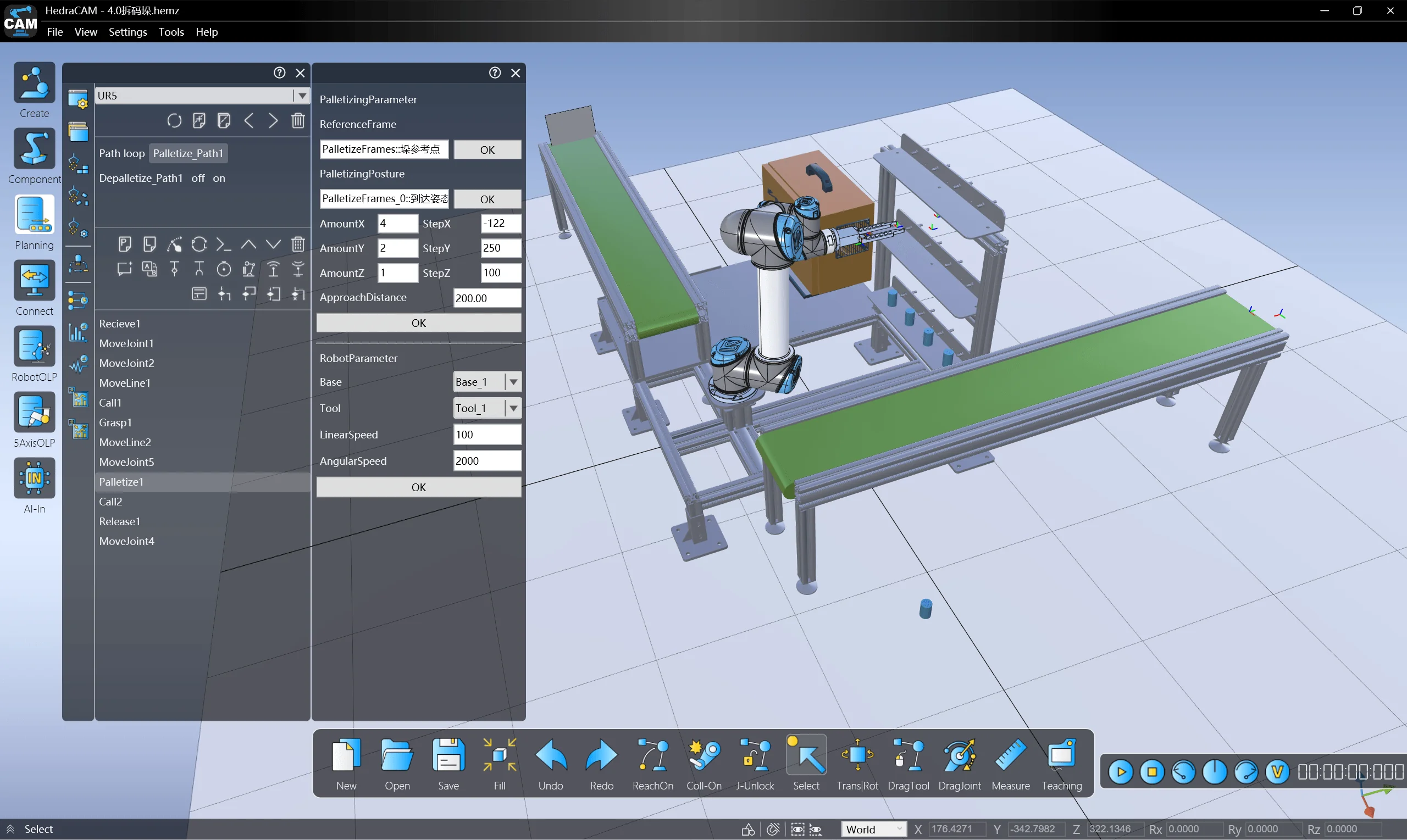
Intelligent Palletizing
Physics Engine
PBR Rendering
Palletizing
Tool Change
-
Deep Virtual Commissioning
Integrating robot virtual controllers, supporting connection of external PLC or custom controllers to the simulation system, completing all code and logic integration debugging before physical production.
-
Intelligent Manufacturing Process Closed-Loop
Through real-time communication interfaces, mapping physical field robot status to 3D models in real time. Achieving dynamic assessment, predictive maintenance, and full-lifecycle operational visual management.
Virtual Commissioning & Digital Twin
Virtual Commissioning
Predictive Maintenance
Closed-Loop
Digital Twin