🔑 Core Features
High Compatibility
Supports mainstream brands including ABB, KUKA, FANUC, Yaskawa, and collaborative robots; multi-robot collaboration simulation; supports handheld tool, handheld workpiece, and mixed-motion modes.
Exclusive Curved Surface Point Selection
Proprietary rapid trajectory generation based on curved surface feature points — no manual edge marking needed, dramatically improving complex surface grinding trajectory efficiency.
Grinding Wheel Lifecycle Management
Grinding/cotton wheel wear simulation and analysis to extend wheel life and ensure consistent workpiece quality.
Adaptive Precision Grinding
Automatically adjusts grinding/polishing strategy based on actual workpiece condition; real-time grinding force and contact monitoring to guarantee machining quality (paid option).
Expert Process Strategies
Built-in expert process strategies and parameters for automotive thin-walled parts, blades, and more — ready to use out of the box withoutiterative debugging.
Flexible Coordinate Transformation
Switch between handheld workpiece and handheld tool paths via coordinate transformation; supports external TCP device workpiece positioning and path planning.
🖥️ Function Showcase
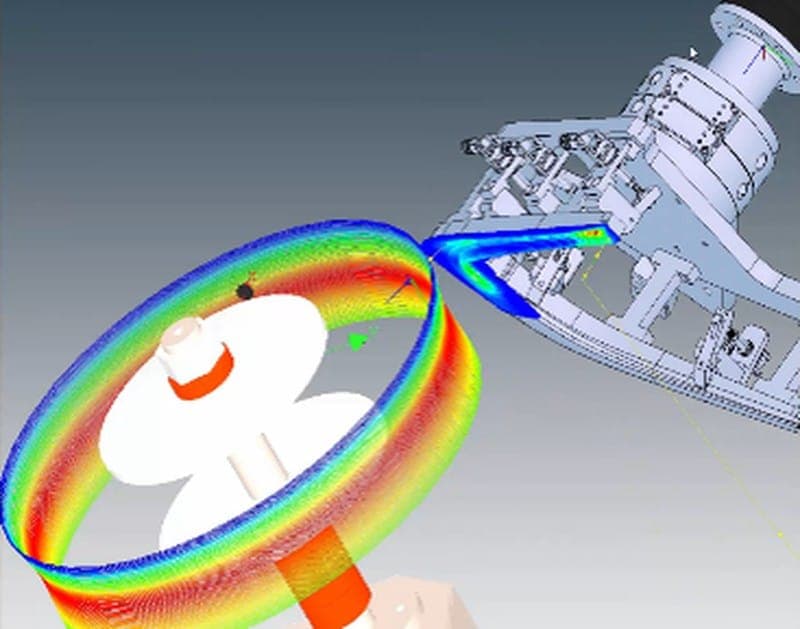
Cotton Wheel Wear Simulation

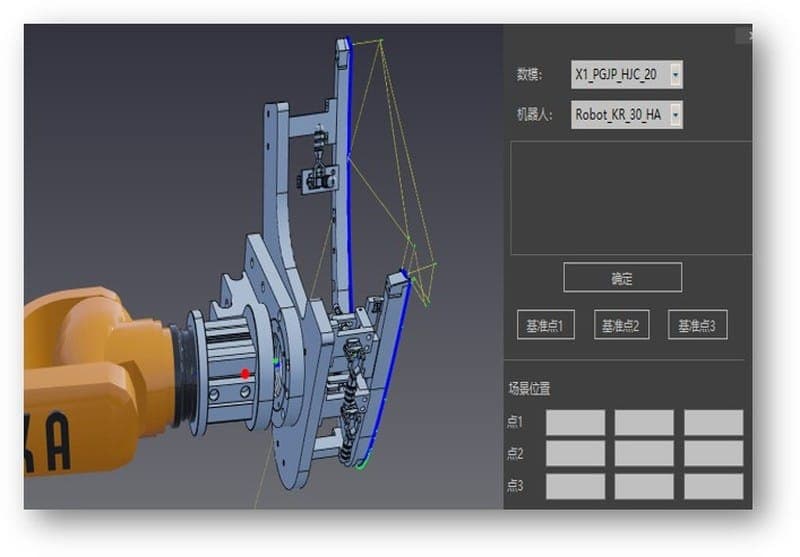
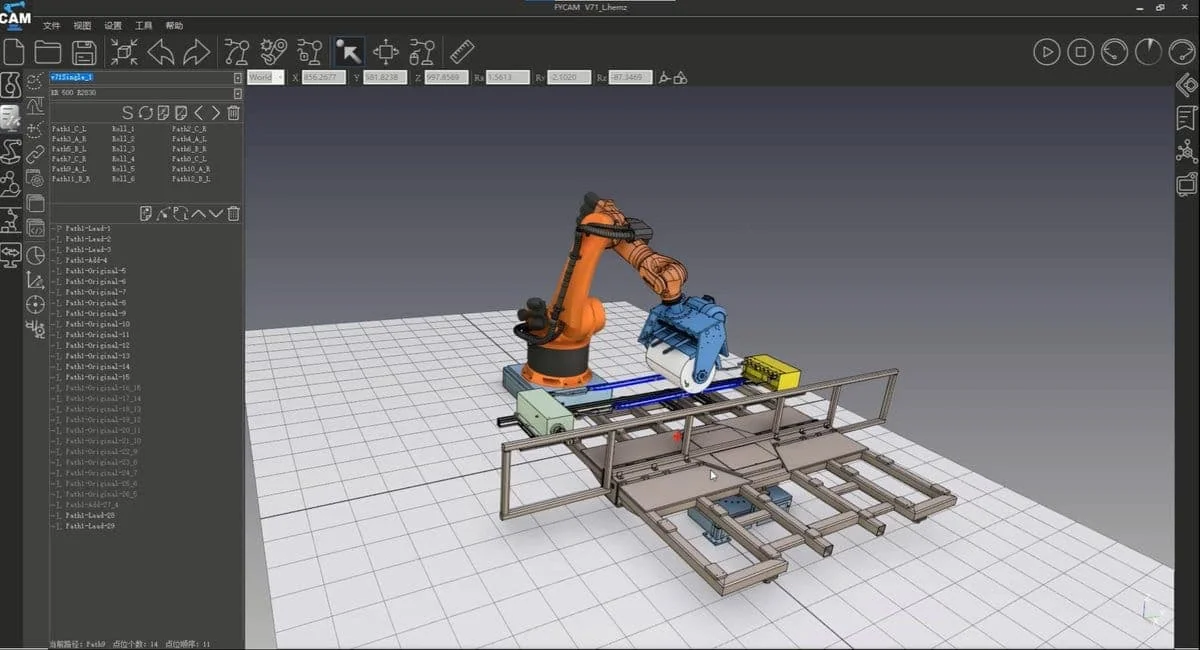
3D Offline Programming
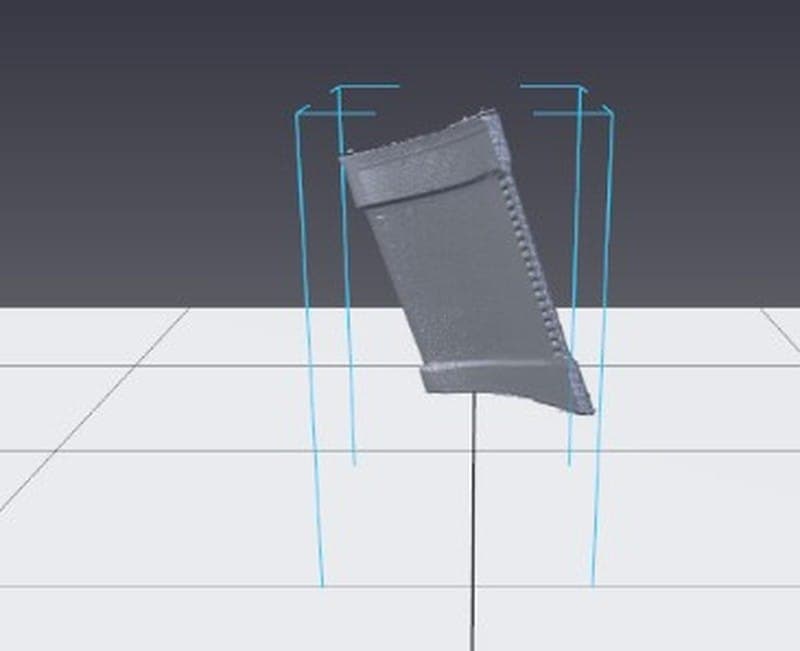
3D Point Cloud Programming
R-Corner Intelligent Correction
Handheld Workpiece
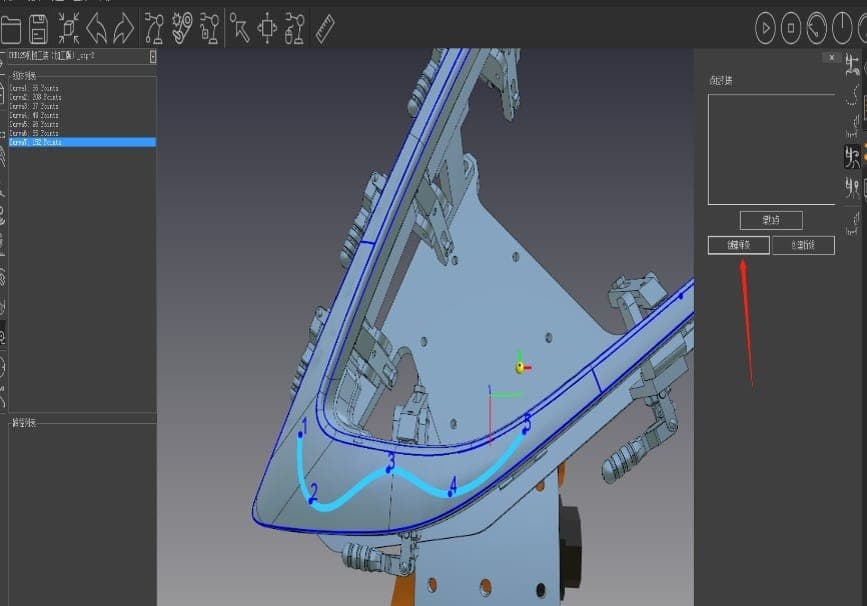
Polyline Programming
📋 Typical Process Workflow
① Pre-paration: Equipment and fixture positioning (workstation / tool head / workpiece)
② Process Selection: Extract normal vectors from curve generation, select tool and base coordinates
③ Path Generation: Auto-generate approach, retract points and contour-following paths
④ Posture Adjustment: Adjust grinding wheel contact angle based on curve curvature
⑤ Simulation Verification: Check collisions and postures via path simulation
⑥ Post-Processing: Convert to executable programs for actual equipment
✓ Supports independent process parameters for A/B/C surface
✓ Supports independent polishing configuration for left/right side ends
✓ Auto-generation of approach/retract points with workpiece rotation
✓ Shake effect simulation (oscillation and step parameters adjustable)
🏭 Applicable Workpieces
Automotive Roof Rails
Automotive Rear Triangle
Automotive Trim Strips
Aerospace Engine Blades
Faucet & Sanitary Ware
Crankshaft / Aluminum Parts
Medical Device Parts
🏭 Application Scenarios
Roof Rail Polishing
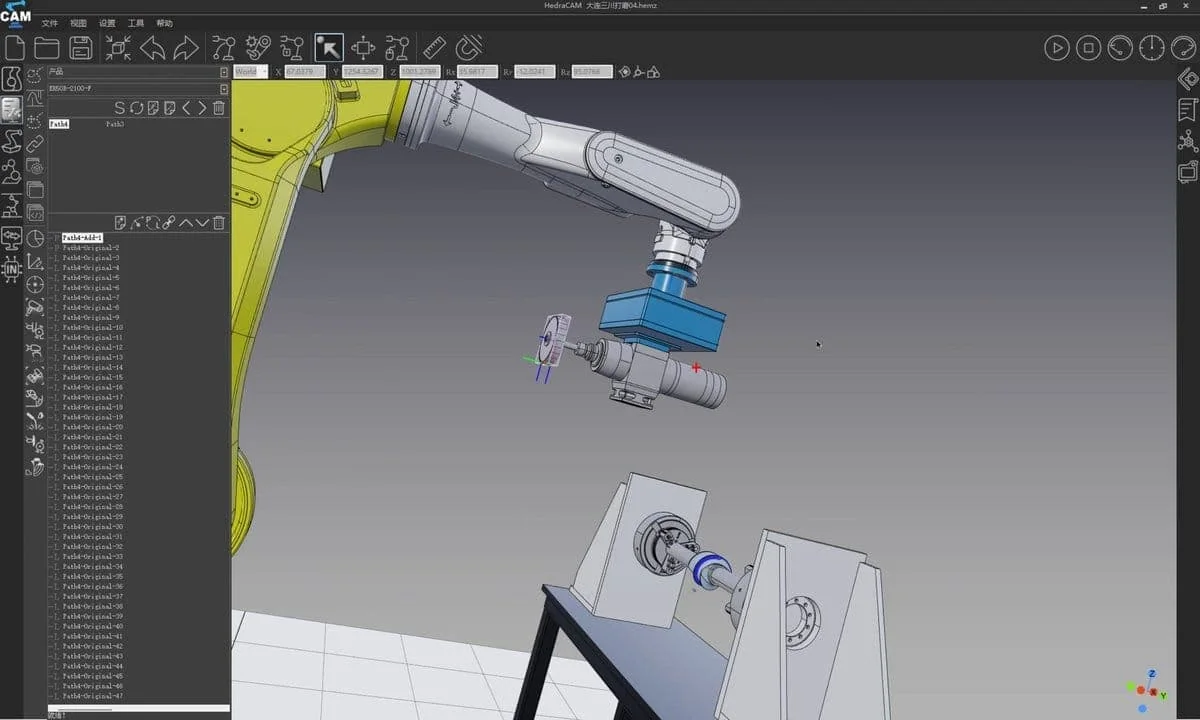
Propeller Shaping Head Grinding
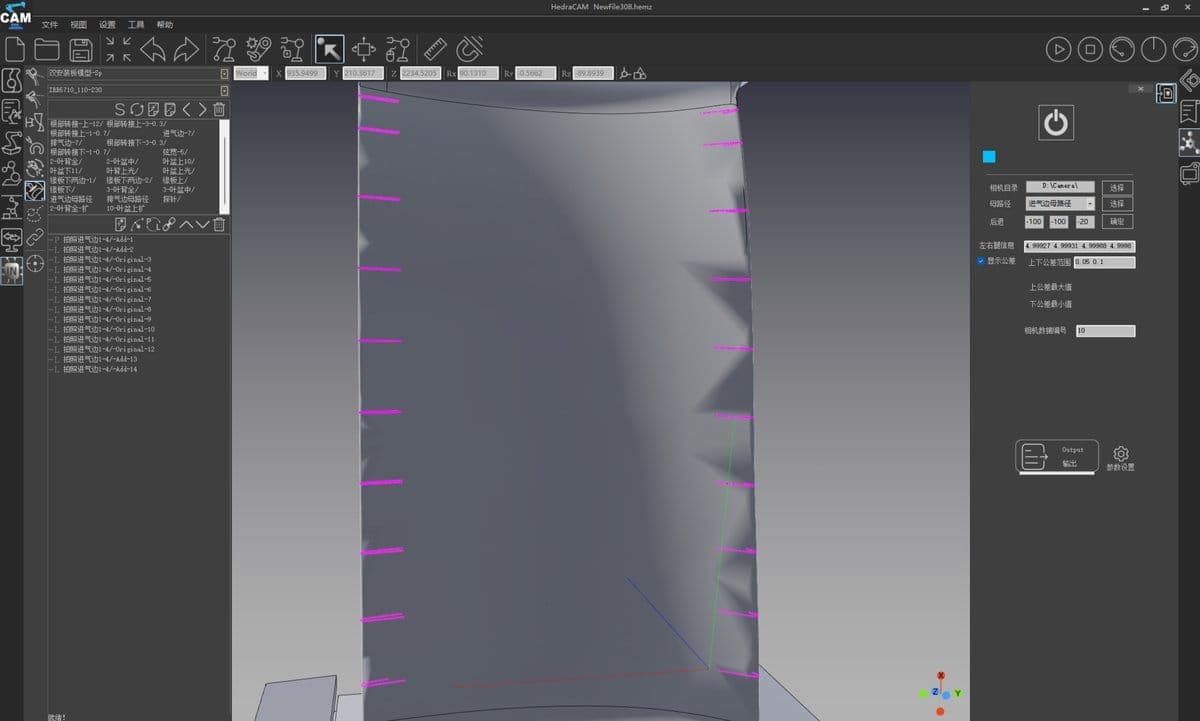
Aerospace Blade R-Corner Polishing