HedraCAM is a fully domestically developed offline programming and production line simulation software for the robotics industry. After 8 years of dedicated effort and iterative validation across nearly a thousand enterprise projects, HedraCAM has reached the level where it can compete with all international peers on equal footing. Against the backdrop of less than 5% domestic software adoption in the enterprise CAx market, HedraCAM's domestic substitution prospects are bright!
HedraCAM supports machine tools, robot cells, and automated production lines, offering six major software solutions: machine tool 3D offline programming, robot 3D offline programming, production line planning simulation, and production line real-time 3D monitoring:
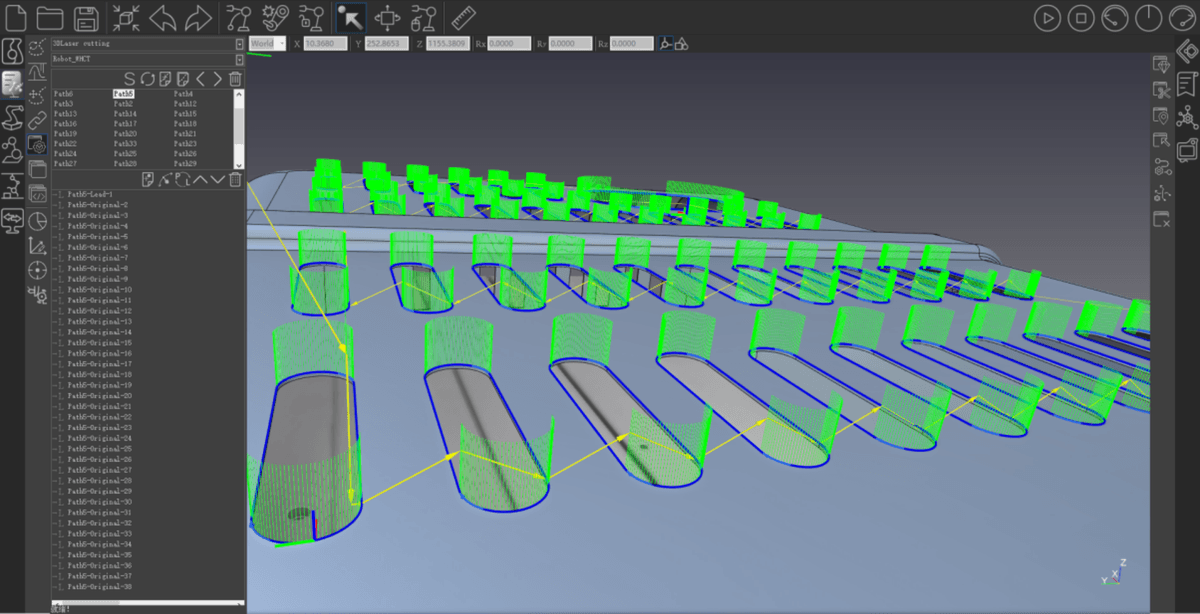
Laser cutting process adds frog jump option: When cutting workpieces with multiple paths, transitioning from one path to another no longer requires frequent lifting. The equipment reduces acceleration/deceleration cycles and can directly use arc transitions, effectively improving cutting efficiency.
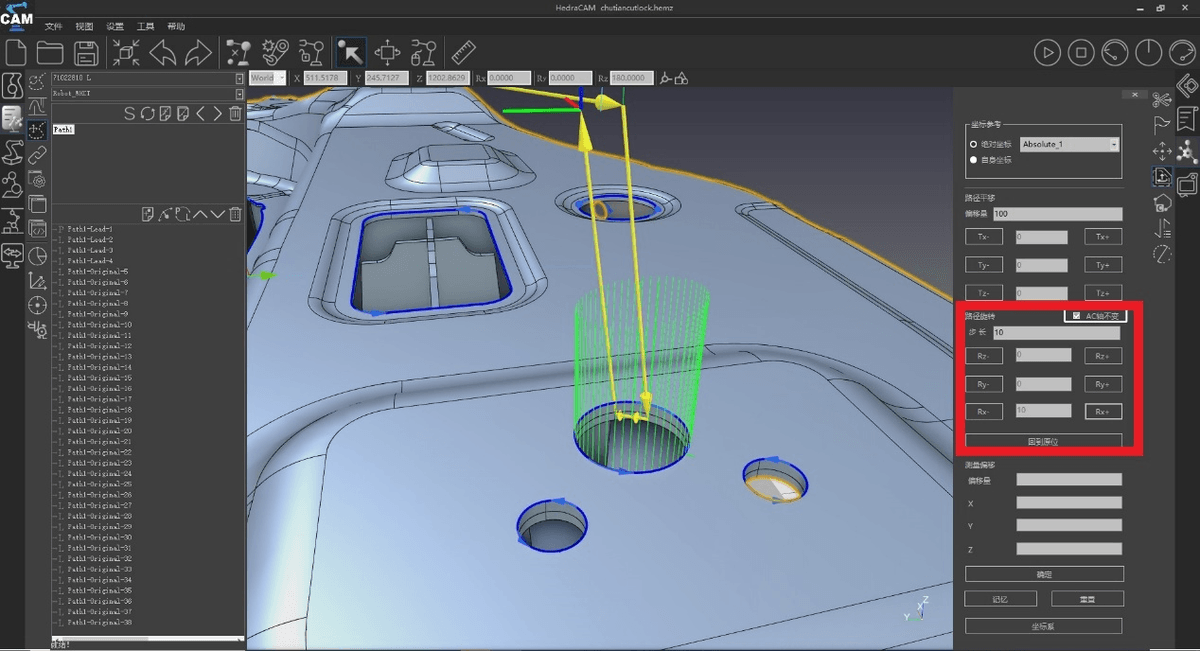
5-axis machining adds AC axis lock option: After 5-axis machine path translation or rotation, spatial positions change and AC axes change accordingly. Enabling the AC axis lock setting simplifies the complex operation of setting 5-axis machine orientations, eliminating the need to readjust paths.
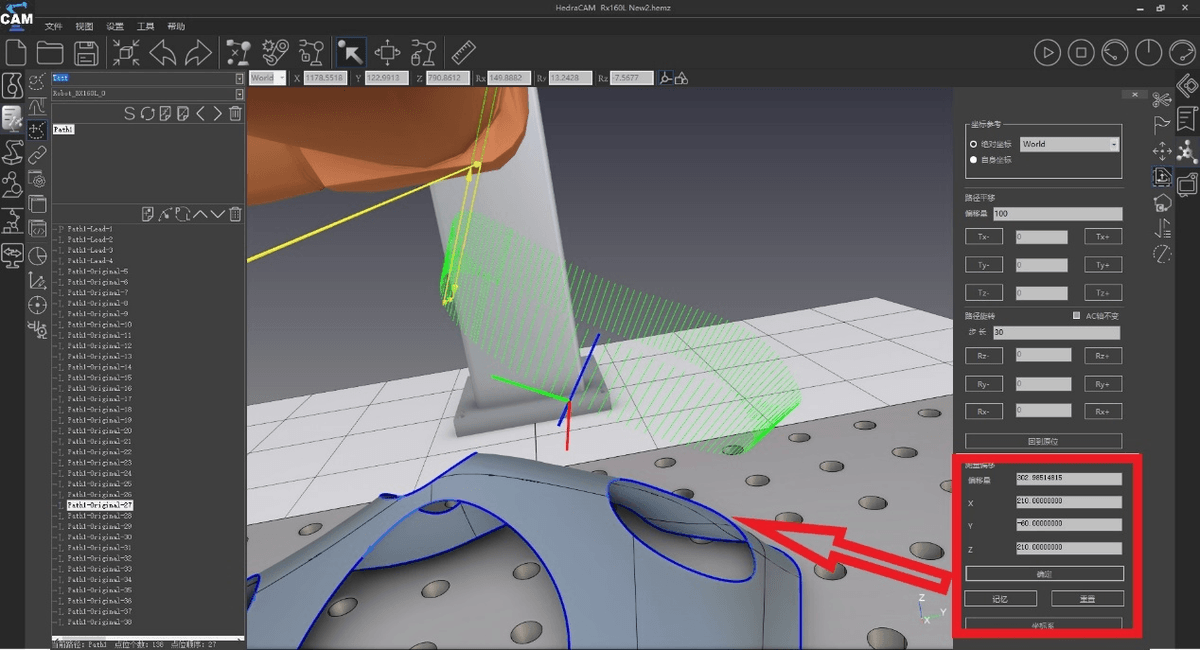
Added measurement offset function: In translation/rotation, scale translation, and axial translation, a measurement offset function has been added that can remember the initial position of points and compare the offset after point movement.
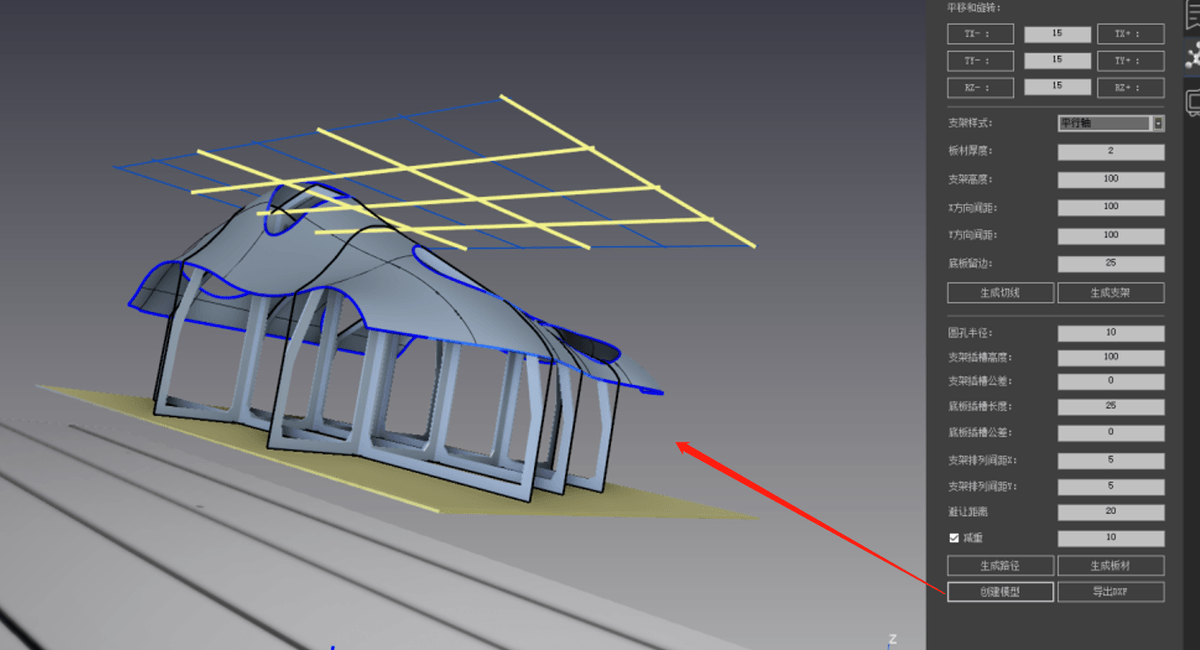
Added model creation function in fixture design module: Supports can be generated based on workpiece models, and combined with fixtures to generate solid models, allowing users to perform three-point positioning using fixtures. This is especially important for complex workpieces where positioning points cannot be easily found.
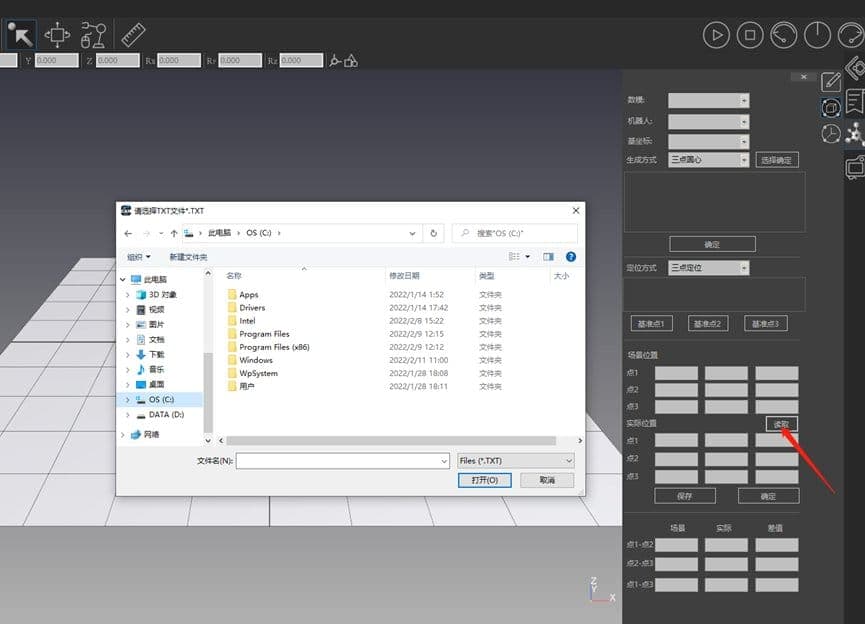
Quick positioning adds vision data reading function: The software can automatically read workpiece marker point positioning information provided by cameras, eliminating the need for manual input.
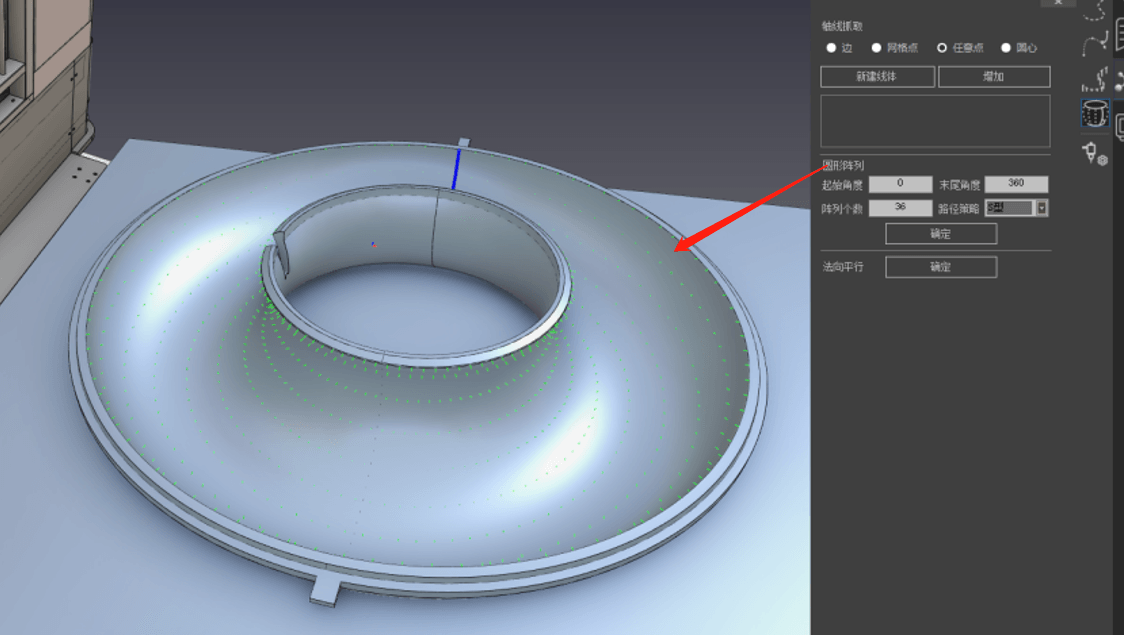
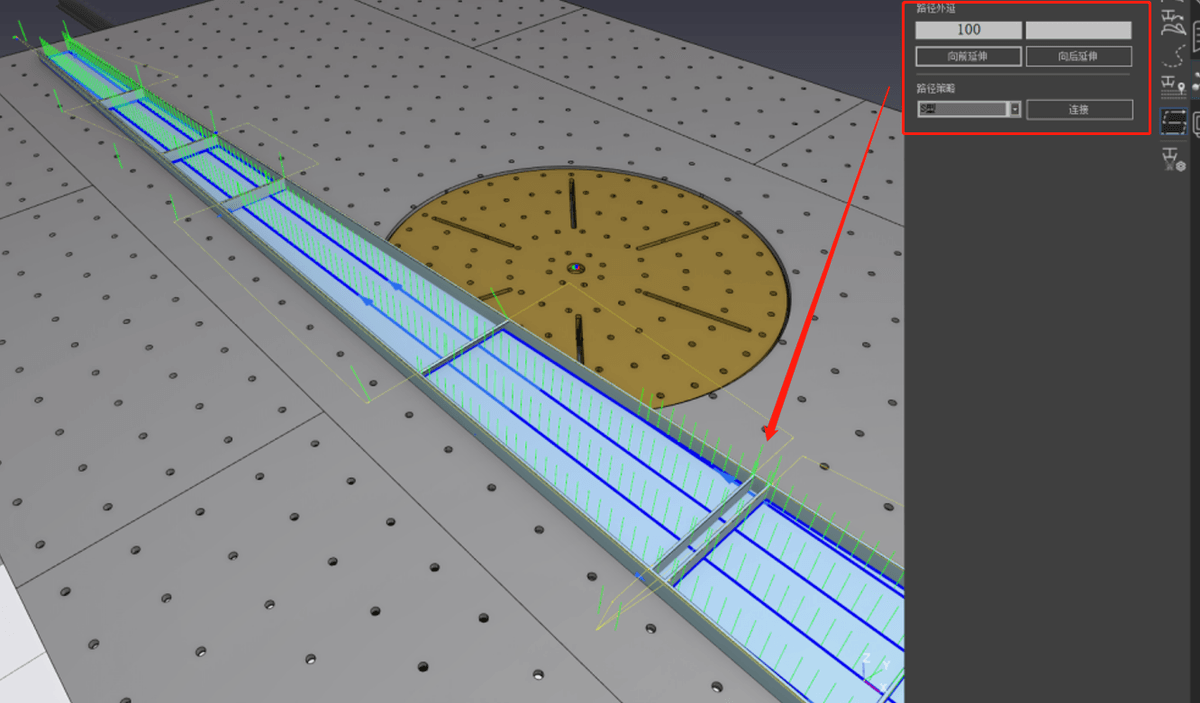
Added numerous special process requirements: For example, for tire inner tube cleaning, reciprocating oscillating paths can be parametrically generated based on the model's ring shape, and can wrap around the entire workpiece. For spray path extension and S-type connections, based on actual process requirements, paths need to extend beyond the workpiece to achieve coverage requirements — a parametric extension function has been added where inputting the extension distance achieves this.
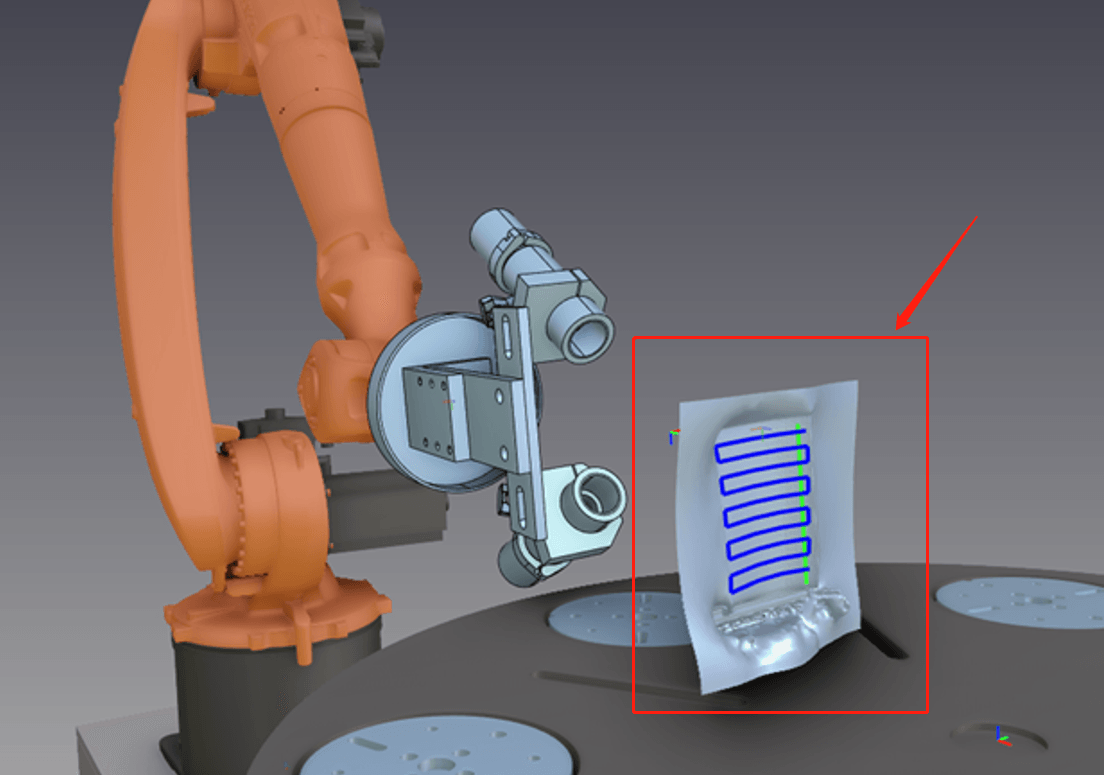
Optimized point cloud reading and surface reconstruction: The algorithm for generating triangulated mesh models from imported point cloud data has been further optimized, improving processing efficiency and meeting the rapid programming cycle requirements of robot systems relying on 3D vision technology.