SMF 模块是面向未来智能制造的全生命周期规划平台,通过虚拟建模、设备仿真、物流调度与系统协同,确保"所见即所得"。在实际投产前,通过精准的仿真分析验证,SMF 模块覆盖工业智能化的各个阶段,有效降低产线部署成本与复杂性,助力企业迈向数字化目标。

全要素布局优化
布局优化
节拍分析
瓶颈诊断
-
分布式架构
突破单机硬件限制,将渲染与计算负载分摊至多个节点,支持构建传统单机软件无法承载的超大产线。
-
实时数据同步
基于高带宽联网模块,确保各终端的操作变更(如设备位姿、逻辑节拍)能在毫秒级映射至主仿真场景中,实现"所见即所得"的异地协同。
-
模块化解耦建模
允许团队按区域、按工序对场景进行切割,每位成员专注独立模块,最终通过中心节点实现无缝拼合,解决超大规模场景构建中的性能与效率难题。
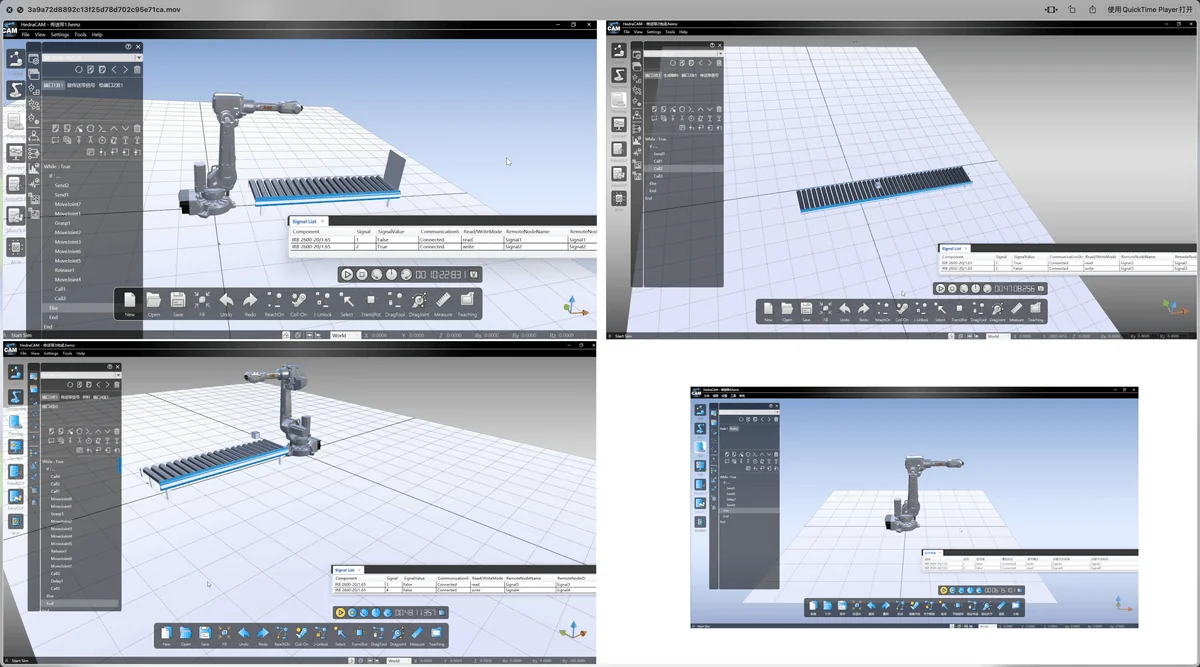
分布式多机协同
分布式架构
实时同步
模块化建模
-
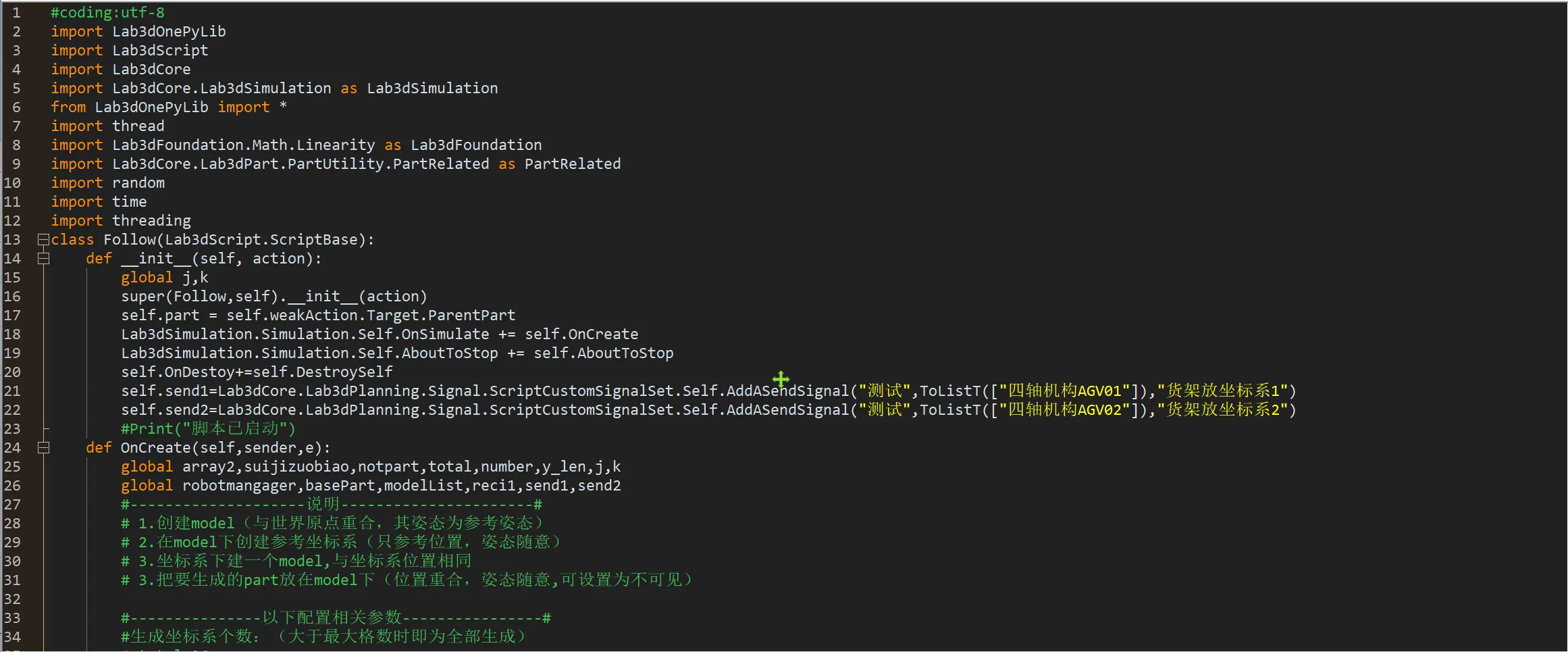
灵活的自定义产线逻辑
支持产线信号流的深度配置,用户可自主定义运行规则、循环语句(Loop)及自定义变量(数值、布尔型等)。实现复杂逻辑的数字化仿真,快速验证方案可行性。
-
开放式运动算法控制
内置运动学结构扩展功能,用户可利用 Python 脚本或系统模板撰写个性化组件行为逻辑,构建专属的动态组件库。
-
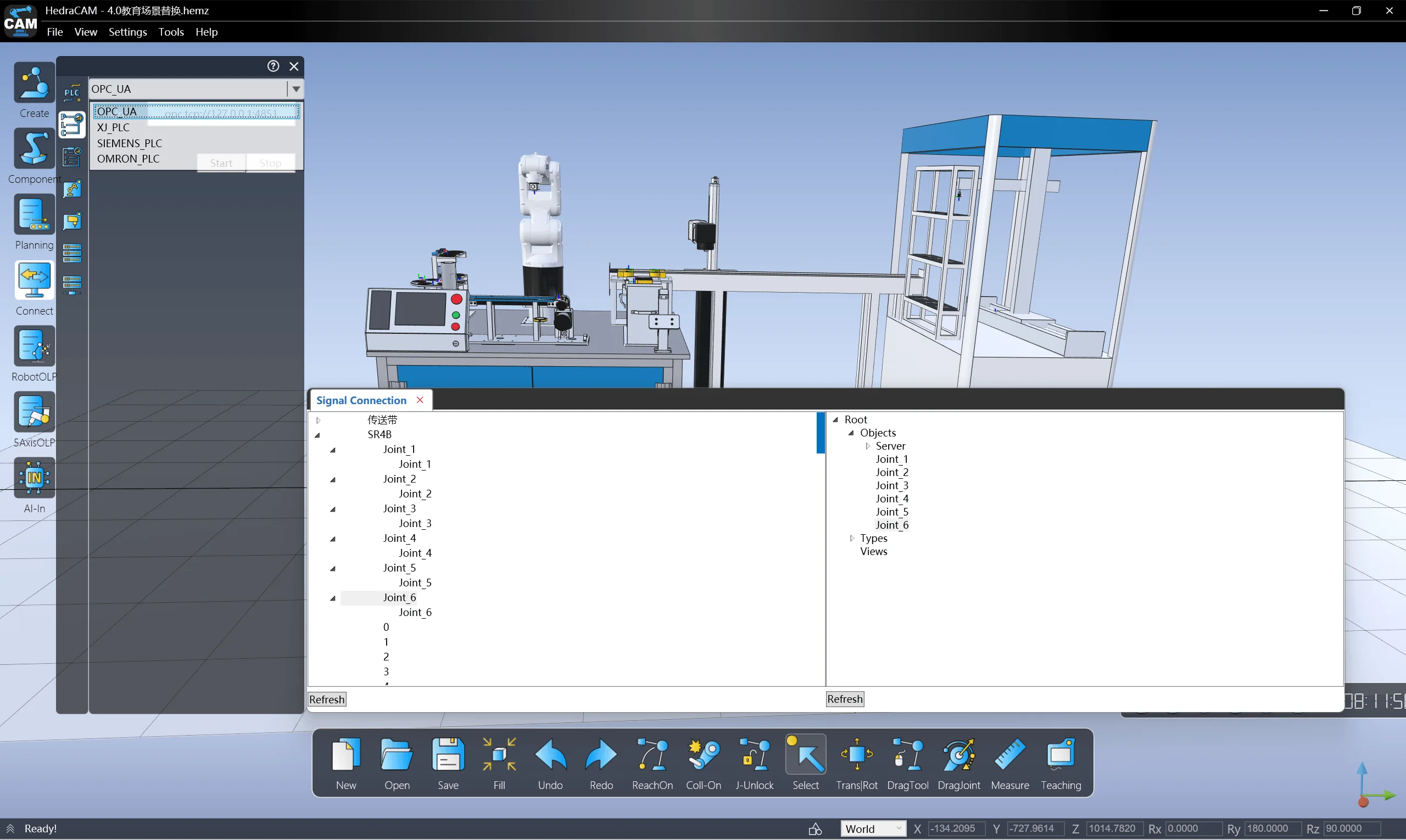
无缝的软硬件互联
支持 OPC UA 标准与 PLC 实时通讯,可与 ABB、KUKA 等主流机器人控制器直连,实现数据的高效交互与指令同步。

自定义产线逻辑
运动算法控制
信号流
运动算法
OPC UA
PLC
-
碰撞自动检测
集成强大的物理学仿真引擎与 PBR 渲染技术,支持真实的物理碰撞检测。在完全逼真的虚拟环境中测试机器人可达性,确保设计方案零误差。
-
智能拆码垛专家
通过参数化设定堆垛/拆垛间隔,仅需设置起始轨迹即可实现全自动仿真规划,极大缩短复杂场景的编程时间。
-
工具头快换仿真
内置末端执行器快换模块,精准复现真实产线中的工具切换流程,为柔性制造方案提供可靠依据。
物理引擎
PBR 渲染
拆码垛
工具快换
虚拟调试与数字孪生
虚拟调试
预测性维护
闭环管理
数字孪生