HedraCAM三维点云比对模组是HedraCAM软件的特色功能组件之一,专为工业领域的零件增材(熔覆修复、再制造)、减材(抛光打磨R角高精度补偿)等场景设计。通过三维CAD模型与扫描点云模型的对比,自动识别零件缺损或多余区域,生成精确的机器人修复或补偿加工路径。
-
同步导入
支持三维模型与三维视觉点云的同步导入与可视化。
-
三点定位
通过三个对应特征点实现模型精确重合,操作简便高效。
-
自动识别
基于模型对比算法,精确计算磨损、缺失、多余部位的几何形状。
-
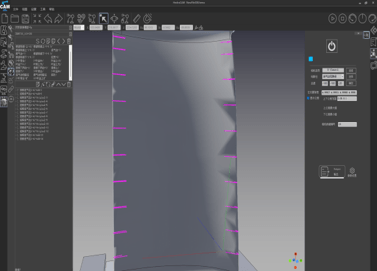
可视化对比
重合后的模型差异直观展示,缺损/多余区域一目了然。
CAD导入
点云导入
三点定位
自动识别
-
STP/STEP
直接读取标准CAD设计模型。
-
OBJ/STL/TXT
兼容三维视觉设备输出的点云或网格数据。
-
DXF格式
可处理二维截面数据。
-
模型轻量化
大尺寸模型自动优化,确保流畅运行。
STP
STEP
OBJ
STL
DXF
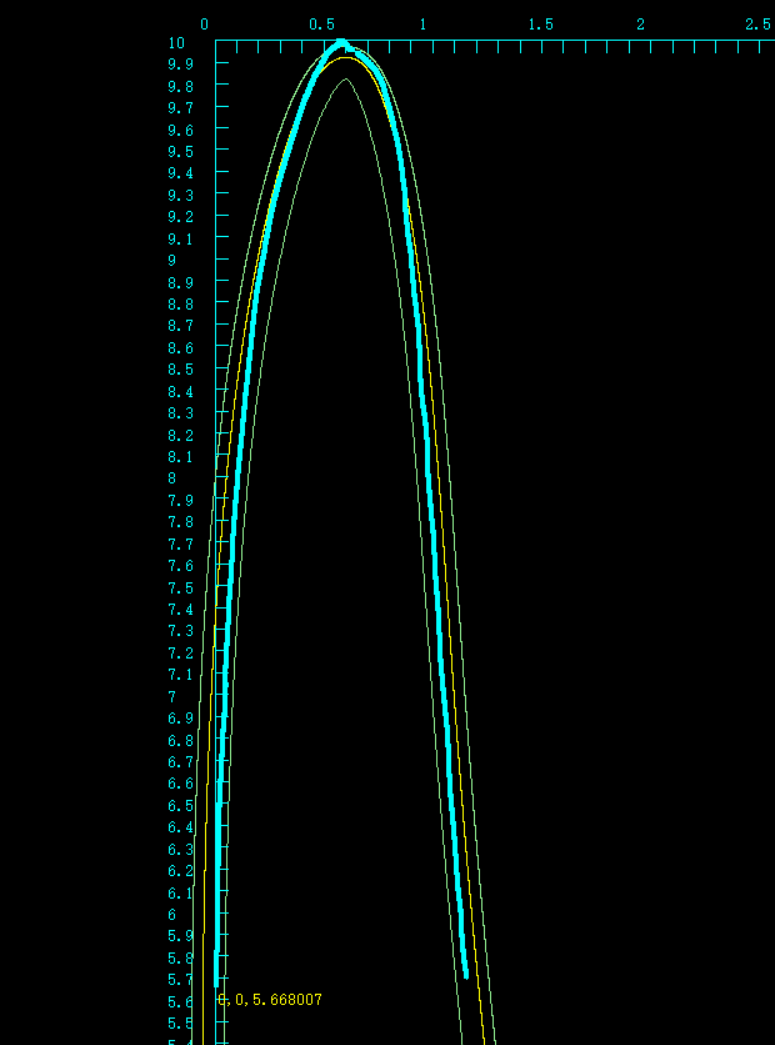
减材R角抛光
总结
HedraCAM三维点云比对模组专为工业增材/减材场景设计,通过CAD模型与三维点云智能对比,自动识别缺损区域并生成修复路径,实现从模型对比到路径输出的全自动化流程,大幅提升修复与补偿效率与加工精度。