机器人离线编程模组(OLP)是 HedraCAM 平台的核心功能模块,专为工业机器人编程而生。通过创新的 2D 可视化节点流程、智能姿态优化算法与物理级工艺仿真,让复杂的机器人编程任务化繁为简,实现从模型导入、路径规划到仿真验证、代码输出的全流程自动化。
-
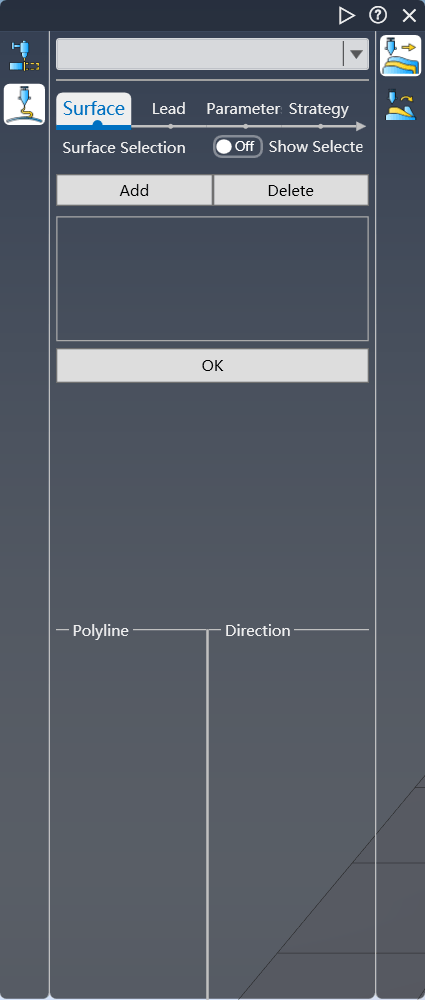
引导式流程化操作
采用创新的全流程操作架构,将复杂的编程任务拆解为标准化的 2D 可视化节点。从模型导入、路径规划到仿真验证,每一步均有清晰的引导提示,零门槛快速上手。
-
多源数据融合
具备极强的底层兼容性,支持实体(Solid)、曲面(Surface)、测点数据、扫描三维点云及 STL 网格等多种数据格式。无论面对原始 CAD 模型还是逆向工程数据,均能实现精准的轨迹规划。
-
智能姿态优化
内置自动姿态寻优算法,能够实时检测并自动避让奇异点、行程限位及物体碰撞。支持交互式曲线调节工具,允许对局部轨迹进行微调,确保加工万无一失。
-
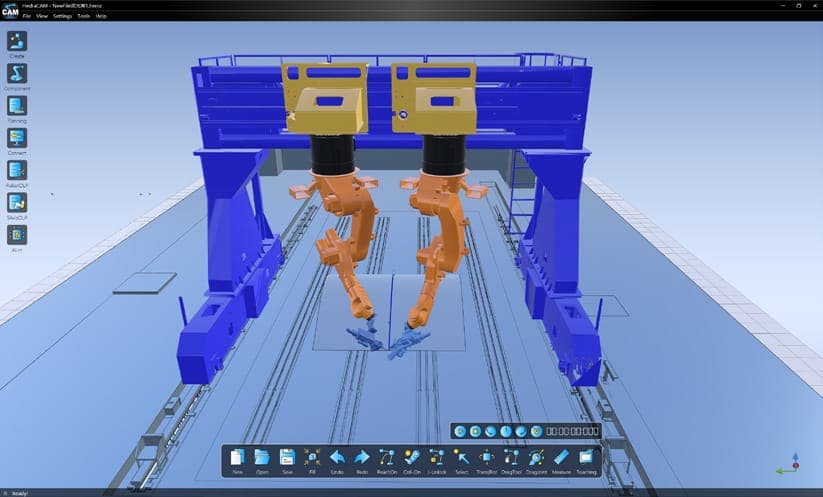
物理级工艺仿真
在扫描、喷涂、喷丸等特定场景中,软件提供实时的工艺渲染效果。通过工件表面颜色的动态变化,直观呈现已加工区域与未覆盖区域,辅助工程师进行深度的工艺一致性分析。
2D 可视化节点流程
多源数据融合
2D 节点
多源数据
姿态优化
碰撞检测
工艺仿真
多机器人协同
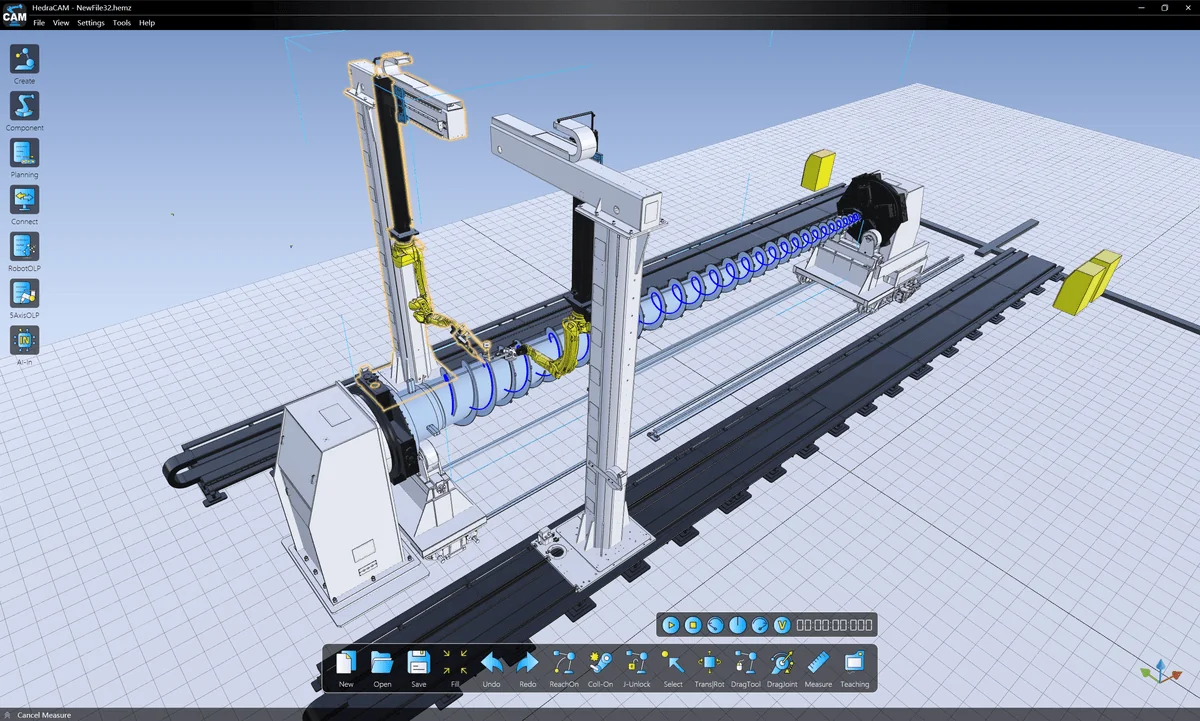
21轴联动