🎬 方案视频演示
🎯 系统架构
机器人放射治疗系统的核心是交互式机器人技术,整套一体化系统可实时收到由于呼吸运动引起患者肿瘤位置改变的反馈,基于这种反馈,机器人系统在运动中持续追踪肿瘤的动态位置,自动持续地以低于毫米级的精度投射每一次的治疗光束。
系统由3台机器人组成:治疗床机器人、C型臂影像系统、粒子束治疗机器人,结合机器人安全系统和复杂动态建模系统,多机器人之间进行大量实时数据交换。HedraCAM作为核心编程仿真软件,负责3台机器人的扫描编程控制,是保证放射治疗安全、高效的关键。
🔬 核心功能模块
离线构建系统 — 场景布局搭建
基于三角网格轻量化模型技术,支持CATIA、UG、SolidWorks等主流CAD数模导入。搭建放射治疗机器人手术平台,包括治疗头机器人(6轴)、治疗床机器人(6轴)、C型臂影像系统、平移轴滑轨等全部运动组件,实现多机器人协同布局
离线构建系统 — 安全工作空间
通过碰撞检测构造治疗安全区域,定义各组件间安全距离(50~200mm)。针对不同部位肿瘤分别构建头部安全工作空间和盆腔安全工作空间,确保治疗过程中机器人与患者、设备间零碰撞风险
离线构建系统 — 路径规划
支持定点治疗和拉弧治疗两种模式。定点治疗在安全区域选取特定治疗点,粒子光束定时开关;拉弧治疗在弧段间连续照射。路径采用球面圆弧过渡,同一经纬度的点通过圆弧过渡,不同经纬度的点通过直角过渡点连接,优化治疗路径效率
离线构建系统 — 治疗计划保存
通过模拟编程仿真确认路径安全可靠后,将筛选并通过路径规划的治疗计划保存为特定格式数据文件,供在线控制系统调用执行,确保治疗流程可追溯、可复现
在线实施系统 — 实时通信
基于C/S模型实现上位机与KUKA机器人控制器(EthernetKRL模块)实时数据传输,支持运动控制和状态监控双频道通信,通信频率约20ms,确保治疗过程中数据同步零延迟
在线实施系统 — 远程控制
在线控制面板集成治疗计划管理、连接状态监控(白/绿/红三色指示)、治疗运行控制、紧急中断控制等功能。支持暂停/继续/停止三种治疗模式,确保突发情况下的患者安全
在线实施系统 — 同步编程仿真
实时数据存储模块以20ms频率保存机器人笛卡尔坐标、关节角度及姿态信息。编程仿真引擎根据实时位置信息同步驱动虚拟模型运动,医生可在监控室远程查看治疗室设备运行状态
HedraCAM平台能力 — 拓扑路径生成
可将复杂模型修复、整合为理想化完整模型,利用拓扑技术生成机器人路径。支持自动提取拓扑路径,生成机器人可直接运行的加工程序,简化编程流程
📷 功能界面展示
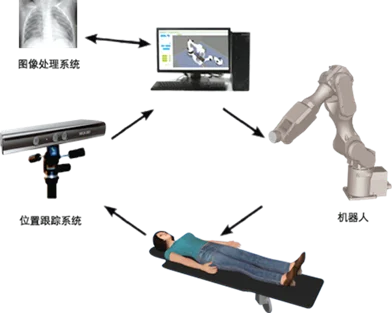
系统原理图
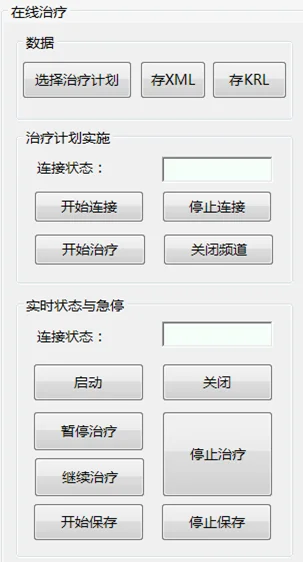
控制面板
🏥 适用治疗领域
头部肿瘤
针对头部区域构建专用安全工作空间,精确定位治疗点位。适用于脑部肿瘤、鼻咽癌、口腔癌等头颈部肿瘤的放射治疗
盆腔肿瘤
构建盆腔安全工作空间,支持大范围治疗点位覆盖。适用于前列腺癌、宫颈癌、直肠癌等盆腔区域肿瘤的精准放射治疗
体部肿瘤
对肺癌、肝癌、胰腺癌等体部肿瘤具有明显治疗优势。配合呼吸跟踪系统实时追踪肿瘤运动,自适应纠偏确保照射精度
局限性淋巴结转移
适用于局部复发和局限性淋巴结转移的治疗。可精准定位转移病灶,优化照射剂量分布,减少对周围健康组织的损伤
💡 HedraCAM平台优势
AI智能免示教编程
采用AI IN智能免示教编程技术,自动完成病变点选取和治疗路径生成,无需人工逐点示教,大幅降低编程门槛和治疗准备时间
数字孪生远程控制
虚拟模型与实际设备实时同步,医生可在监控室远程监控治疗全过程。结合紧急控制系统,确保患者安全和治疗质量
全流程闭环管理
从离线场景搭建、安全空间构建、路径规划仿真,到在线通信控制、实时同步监控,覆盖治疗计划制定到执行的完整流程
多品牌机器人兼容
已适配KUKA等主流工业机器人品牌,SMF平台可扩展支持更多机器人型号,降低医疗设备集成成本