组件模组(ROOT)是 HedraCAM 平台最底层的核心支撑,为所有高级功能模块提供统一的交互界面、运动学内核、资源管理与仿真调试环境。无论用户使用的是离线编程、仿真分析还是工艺优化模块,其底层能力均源自 ROOT 四大组件的深度集成。
-
直观式 3D 旋钮交互
创新右键 3D 旋钮集成旋转、平移、属性检视,流体动画响应,支持快捷键绑定与参数面板深度集成。
-
智能 UI 逻辑
独创坐标透视球联动,同域动态切换,实现界面简洁最大化。
-
个性化主题
预置工业级风格主题,支持 2D 透明度调节,打造专属视觉风格。
-
完整国际化(i18n)
中、英、日、韩等多语言无缝切换,界面文本实时本地化。
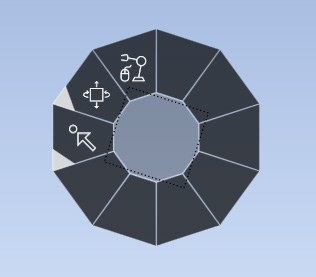
3D 旋钮盘
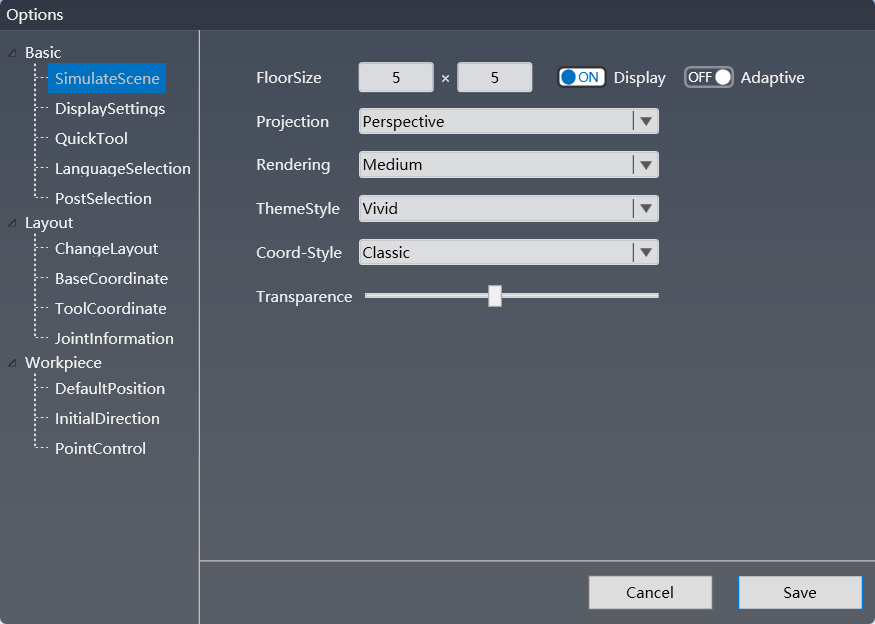
UI 选项设置
3D 旋钮
透视球
快捷键
i18n
主题定制
-
多格式 CAD 原生支持
STEP / IGES / Parasolid / ACIS 等主流工业 CAD 格式一键导入,无需中间转换步骤。
-
几何智能修复
自动检测缝合间隙、自相交、退化曲面,一键修复保证拓扑完整性。
-
装配层级保留
完整保留装配体层级结构,支持零件级定位与属性继承,避免数据丢失。
-
高精度运动学求解
支持多品牌机器人运动学建模,精准轨迹规划与奇异点规避。
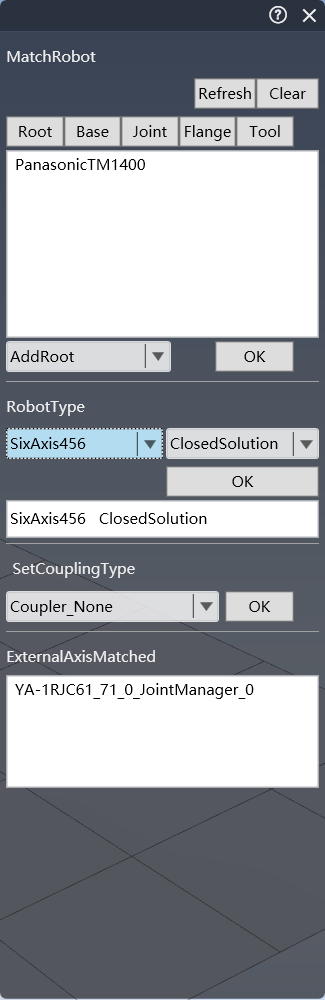
MatchRobot 参数配置
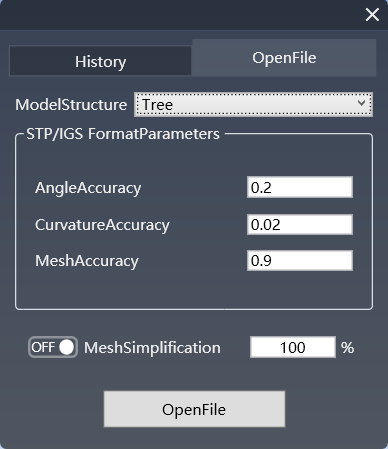
STP / IGS 导入
STEP
IGES
几何修复
装配层级
运动学求解
-
机器人模型库
内置多品牌、多型号机器人三维模型库,覆盖焊接、搬运、喷涂等主流应用场景。
-
工件与工具库
丰富的标准工件与工具模型,支持用户自定义导入与分类管理。
-
模型树结构
清晰的层级树管理,零件拖放排序与参数检索一目了然。
-
材质与渲染资源
PBR 材质库支持金属度、粗糙度、法线等参数精细调节,渲染效果所见即所得。
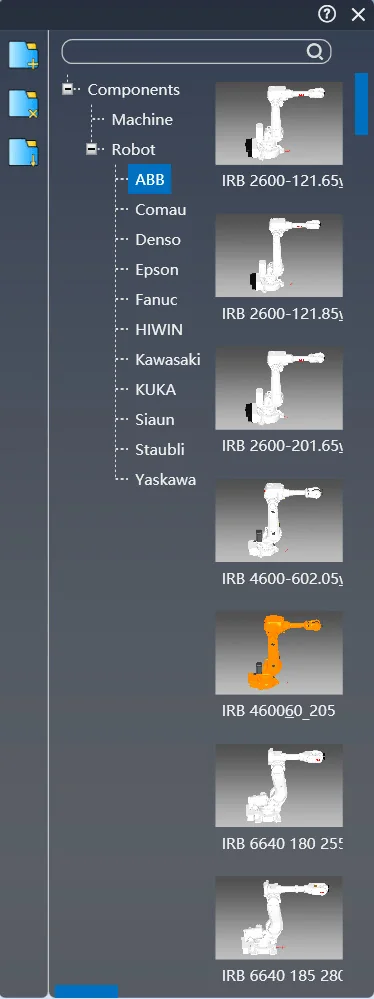
机器人模型库
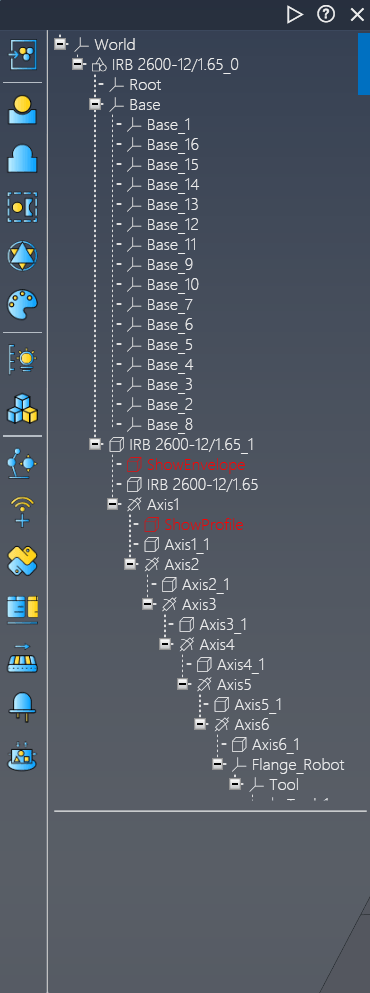
模型树结构
模型库
模型树
分类管理
PBR 材质
-
机器人示教面板
专业级示教界面,支持点位示教、姿态调整与轨迹微调,参数实时反馈。
-
实时仿真调试
断点设置、变量监视、轨迹单步执行,仿真过程全透明可控。
-
碰撞检测与规避
实时检测机器人与工件、环境之间的碰撞风险,智能规划规避路径。
-
轨迹可视化
TCP 轨迹、轴运动、速度曲线等多维度可视化分析,调试效率大幅提升。
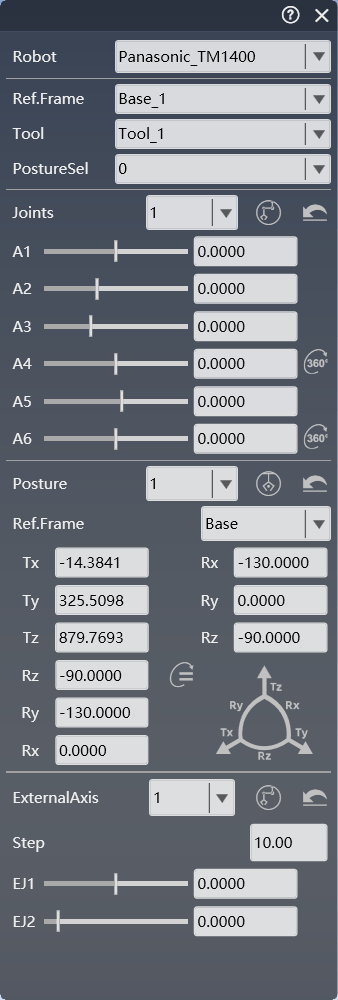
示教面板
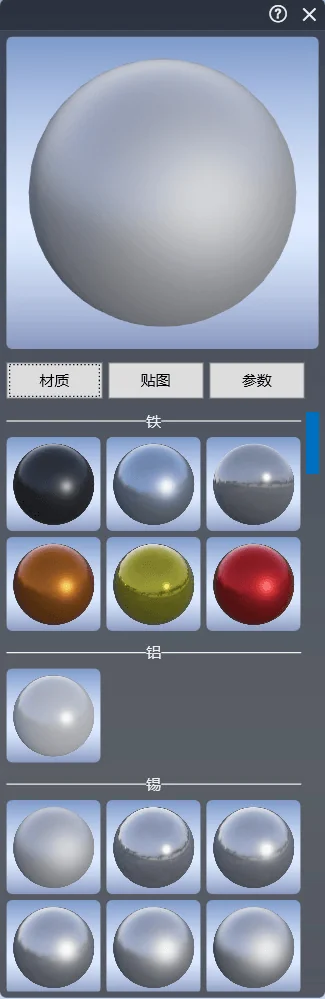
PBR 材质球库
示教面板
仿真调试
碰撞检测
轨迹可视化
PBR 材质