🔧 工艺包核心特点
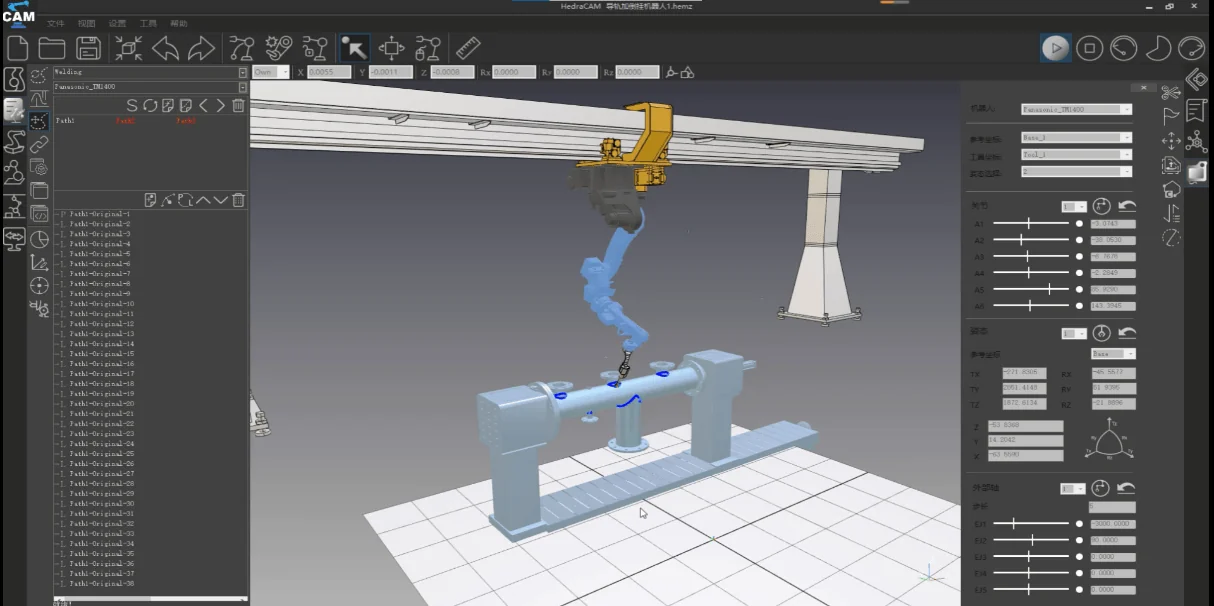
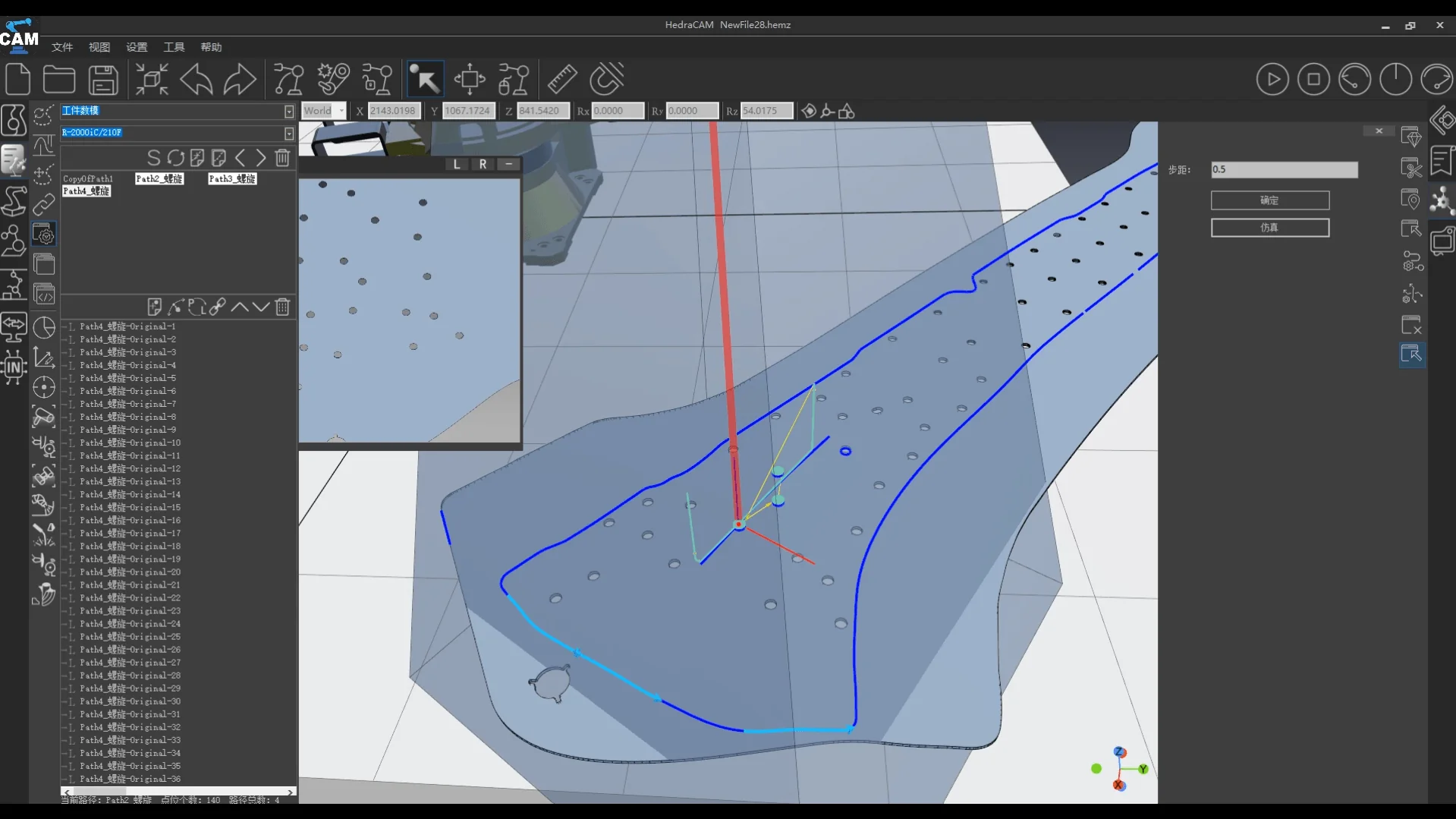
智能轨迹生成
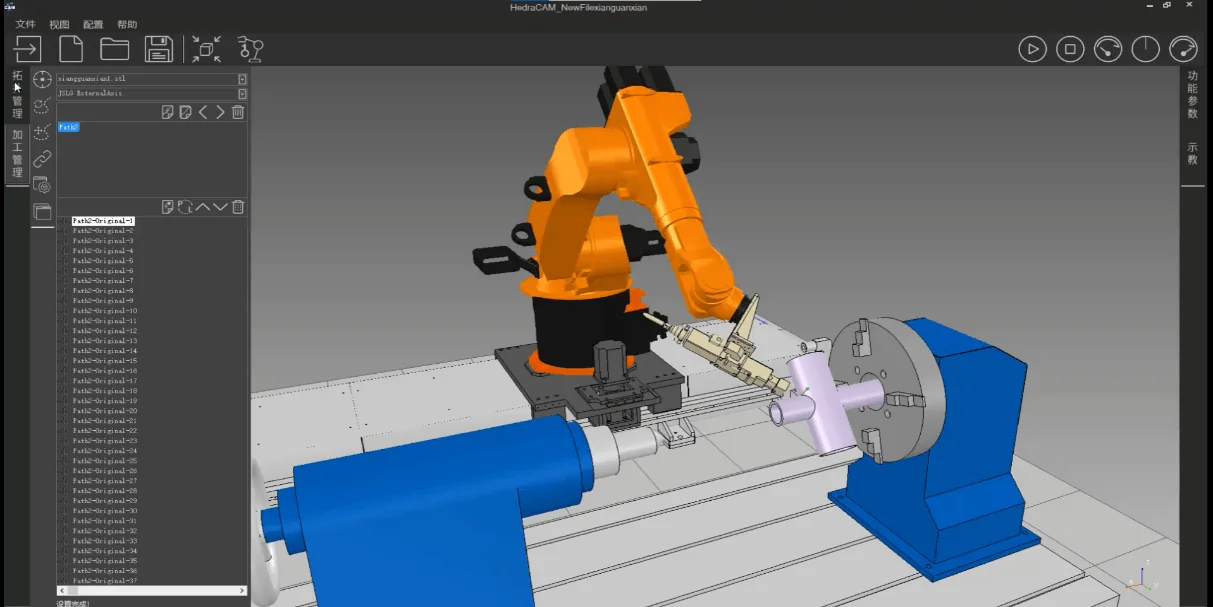
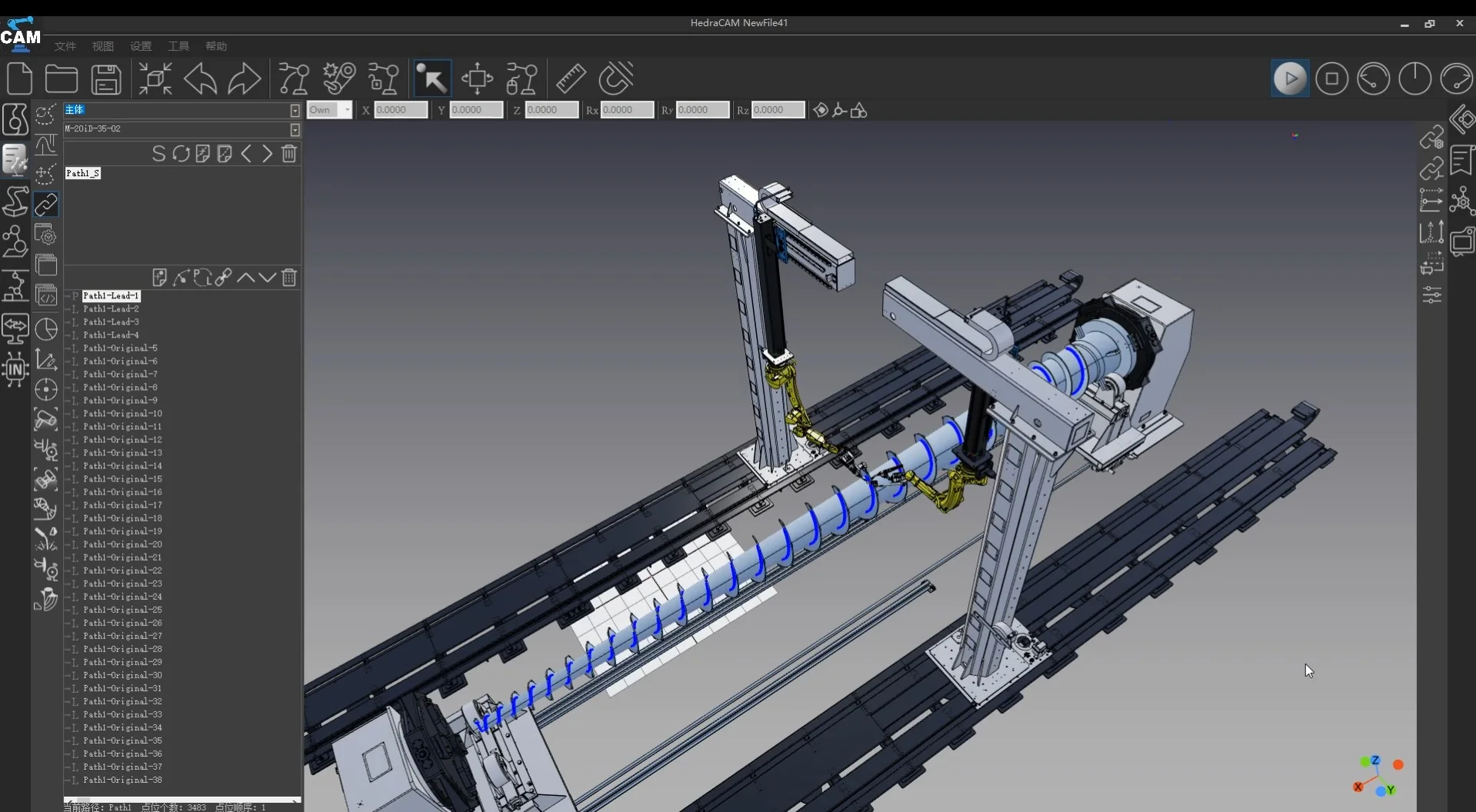
采用拓扑核心技术构建智能选择工具,无需单点拾取,点击工件面、边、体或线体即可自动生成焊接轨迹与法线;支持导入 IGS/STP/STL 等 CAD 模型,直接提取点、线、面特征生成运动轨迹。
多焊接类型支持
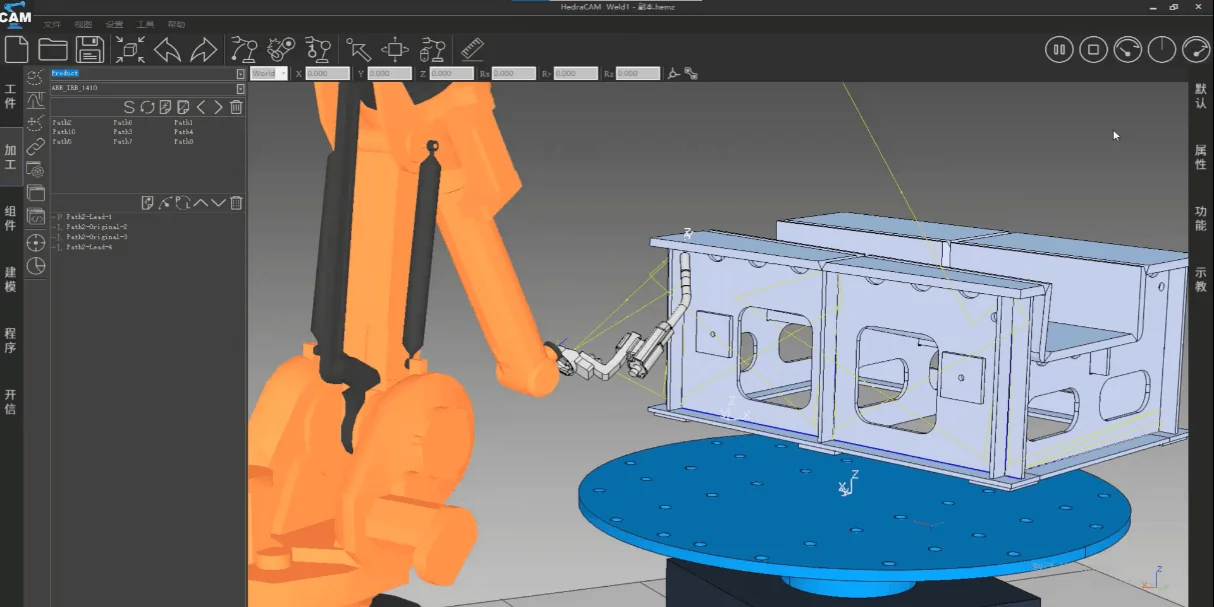
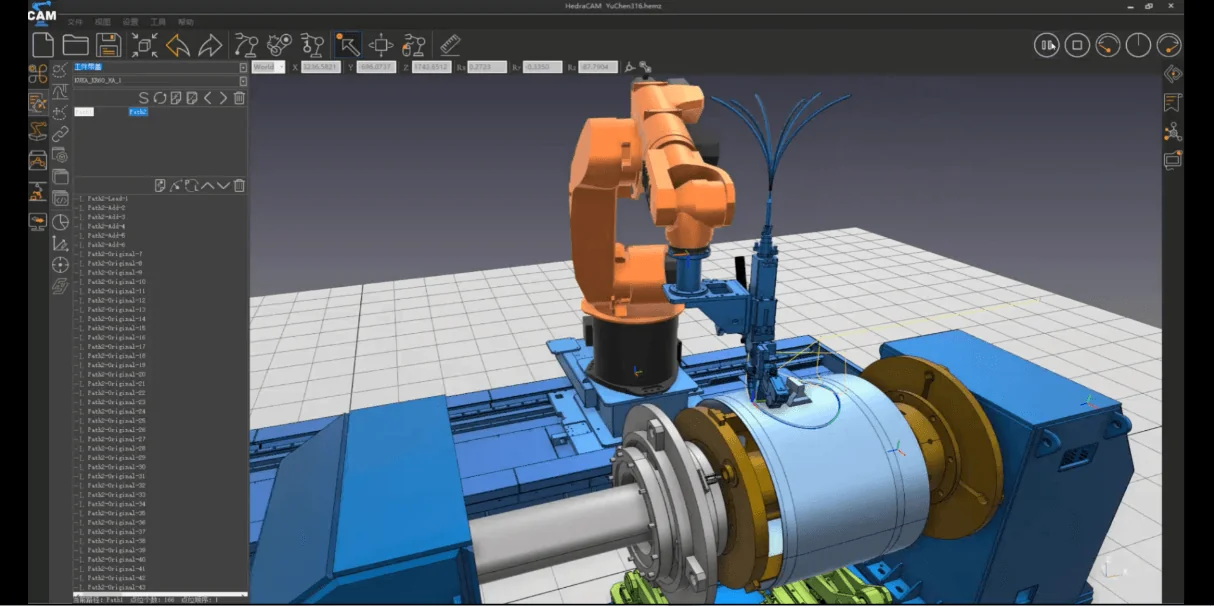
支持弧焊焊接(直线焊缝、圆弧焊缝、角焊缝)、激光焊接(薄板覆盖件高精度轮廓焊接)、复杂空间曲线焊接(三维空间曲线、相贯线等复杂焊缝自动编程)。
全维度轨迹优化
支持快速调整焊枪点位姿态、路径顺序;批量调整位姿统一修改多条轨迹的焊枪角度;姿态渐变实现焊枪姿态平滑过渡;自动排序按最短路径原则重新排列轨迹顺序。
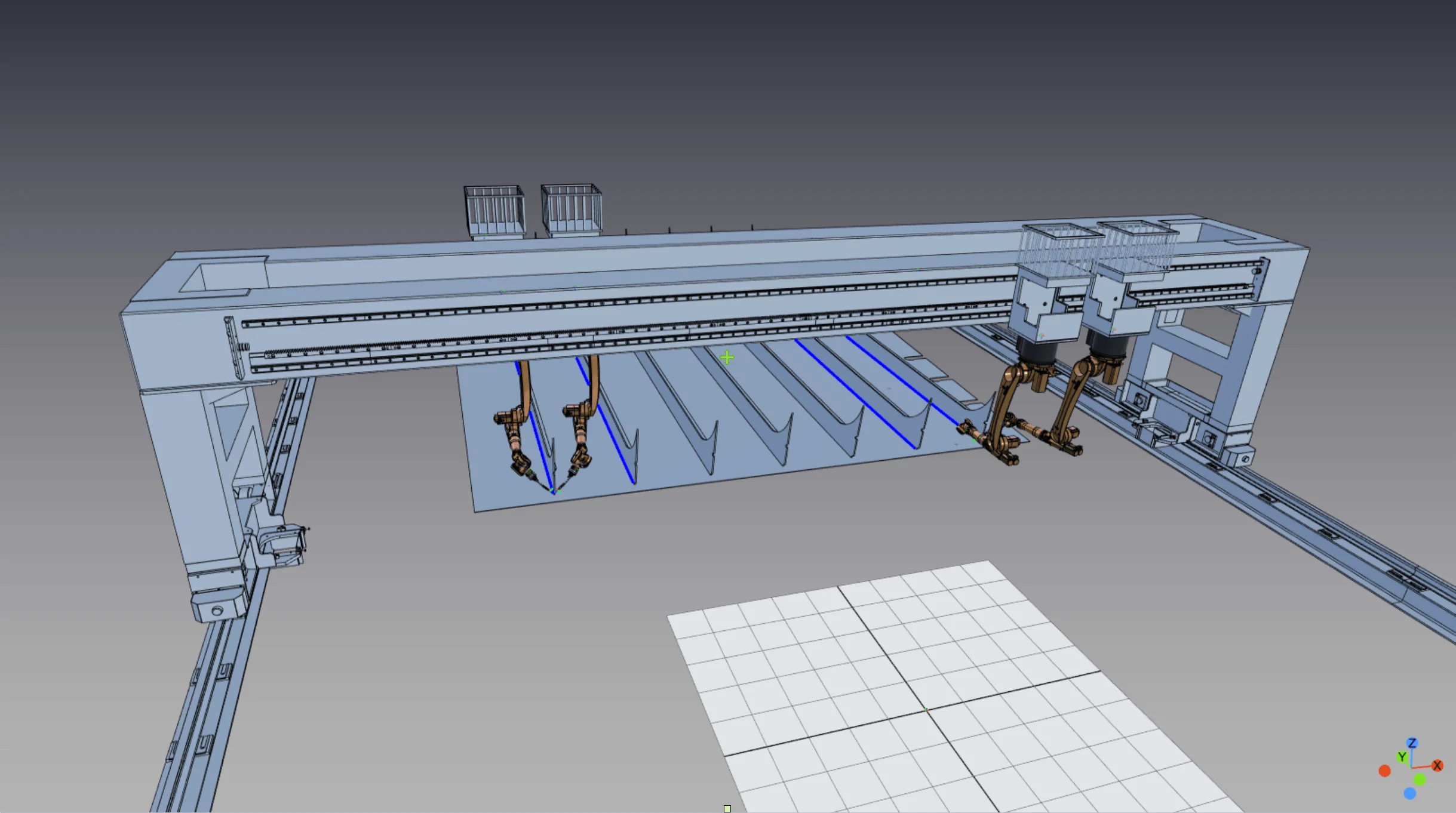
多设备协同编程
支持机床+机器人协作离线编程、双机器人同步焊接(多头同步焊接,提升产能);可将一条机器人路径同时给两台不同机器人执行,满足加工点位数量及位置一致要求。
工艺模板管理
提供焊接工艺模板(电流、电压、速度参数),用户可自定义参数并导出;焊接参数表格化管理,可通过表格方式加载到焊接点位上。
碰撞检测与仿真
对编程路径进行仿真,发生碰撞时橙色显示碰撞效果;实时检查机器人可达性、轴超限;仿真过的路径可进行着色处理,观察焊接路径状态。
🎬 功能展示
📋 智能焊接工艺规划流程
① 离线编程生成焊接初始路径 — 根据工件理论数据及位置,提取模型特征生成初始焊接轨迹
② 焊接姿态调整 — 根据机器人可达性规划路径,调整点位位姿排除不可达、超限等状态
③ 焊接参数设置 — 电流、电压、速度等参数表格化管理,加载到焊接点位
④ 过程仿真 — 对编程路径进行仿真,碰撞橙色显示,修正位姿避开障碍
⑤ 后置输出 — 输出后置程序,导入机器人控制器执行
⑥ 焊缝质量检测 — 对焊缝进行质量检测,反馈焊接工艺参数
⑦ 焊接知识库建立 — 根据反馈参数形成焊接数据表格化,调整仿真路径
⑧ 焊接闭环 — 使用新参数路径焊接,逐步优化质量,形成焊接系统闭环
🏭 适用场景
汽车车身焊接
底盘厚板焊接
航空航天结构件
H型钢焊接
钢结构焊接
薄板覆盖件
复杂空间曲线
多机器人协同
🏭 应用案例
相贯线焊接
航空TIG-MIG复合焊接
航天壳体激光焊接
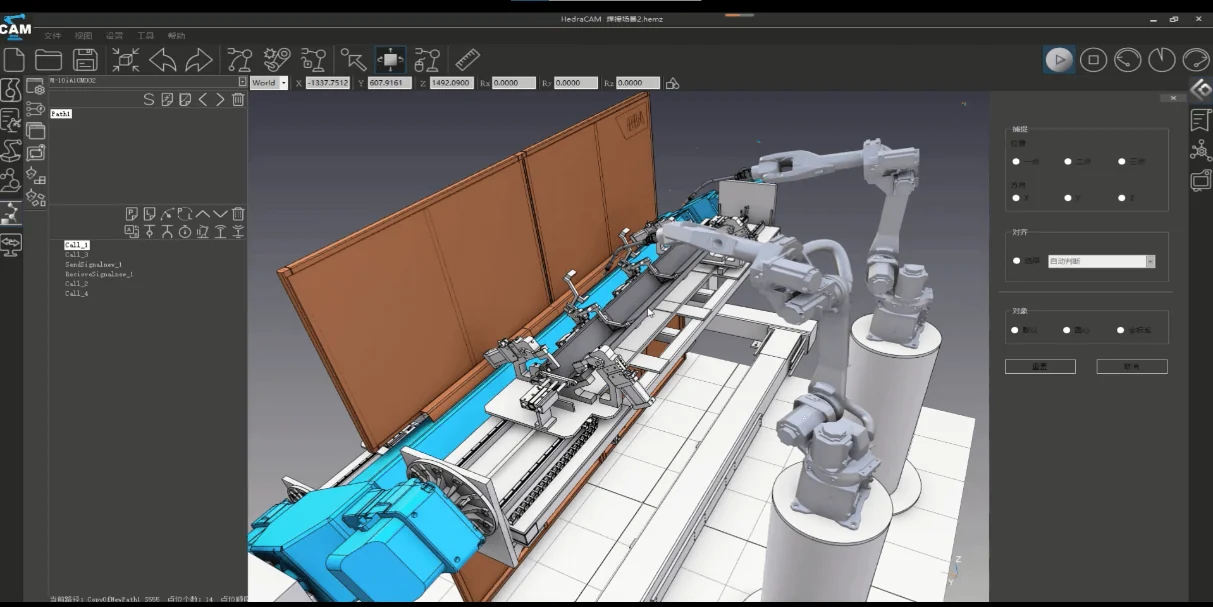
双机器人双工位厚板焊接
石油管道多层多道焊接
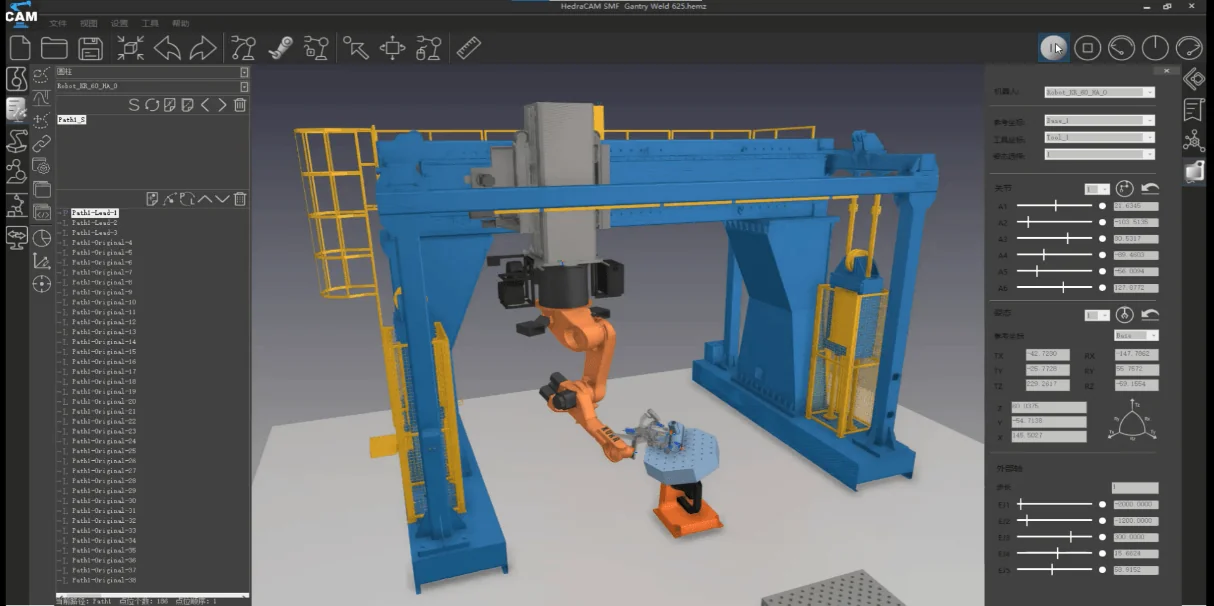
龙门焊接
造船多机器人协同焊接
车身振镜飞行焊接
搅拌螺杆21轴联动焊接
🏆 项目荣誉
江苏省科学技术一等奖
HedraCAM软件焊接工艺包为大型龙门双光束激光焊接装备项目提供机器人离线编程技术,项目团队荣获2021年江苏省科学技术一等奖。