🔧 工艺包核心特点
多品牌支持
支持 Hyper、Atlas、Rigel 等主流测量设备;支持 ABB、KUKA、FANUC、安川、协作机器人等多种机器人品牌;支持 5 轴至 6 轴不同结构类型的机器人仿真。
全格式导入
支持 IGES、STEP、STL、DXF 等标准 CAD 文件格式;支持 stp、step、igs、stl、dxf 等主流建模文件导入;可直接导入三维点云数据生成加工路径。
运动学仿真
具备运动学正、逆解算法,可对工业机器人的可达性、轴超限、碰撞等进行检查,实时观察点位位置姿态及各关节值。
多种测量工艺
支持平面参数化、曲面参数化、拖动模式等多种测量路径生成方式;支持 DIMS 测点文件读取;支持外部轴扫描自动添加过渡点位。
精准定位校准
单点定位与三点定位快速校准;输入实际设备用户坐标、工具坐标及关节软限位;实时匹配场景与实际设备。
碰撞检测
两模型可创建碰撞关系,发生碰撞时自动高亮提示并停止仿真;支持外部轴耦合,龙门多轴可达十余轴联动。
📸 功能展示
📋 功能列表
① CAD 基本功能:点、线、面、圆心、坐标系特征捕捉
② 四元数与欧拉角转换
③ 轨迹生成:法向、角平分线、条口、平面、曲线方向
④ 统一姿态:扫描头保持、一致姿态设定
⑤ 曲面测量:手持、标定、自动生成复杂扫描路径
⑥ 7 轴特殊结构:内径表面测量路径生成
✓ 膜厚分析:扫描覆盖率、高亮可视化
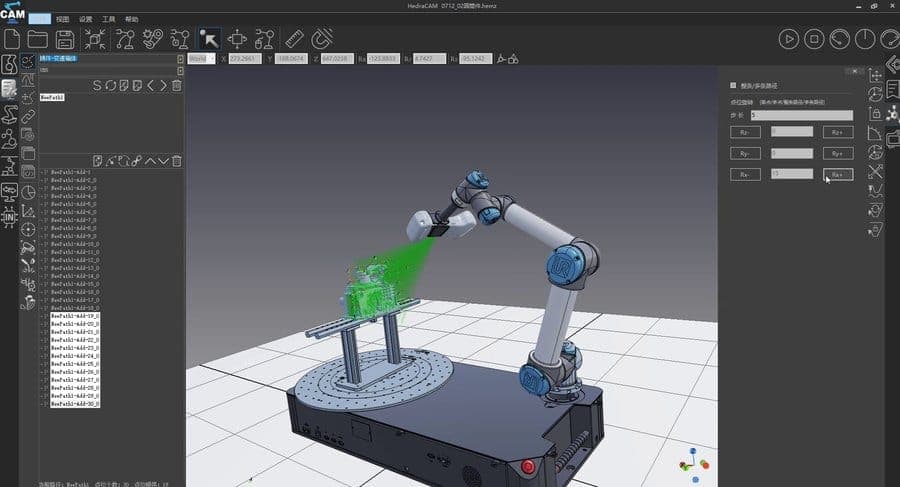
✓ 批量位姿调整:轴向锁定、姿态渐变、自动排序
✓ DXF 支架图纸:支架、图纸、输出
✓ Excel 工艺模板:自定义、工艺参数
🏭 适用场景
白车身测量
航空航天检测
焊前定位
复杂曲面扫描
多机协同测量
质量检测
🏭 应用场景
汽车白车身测量
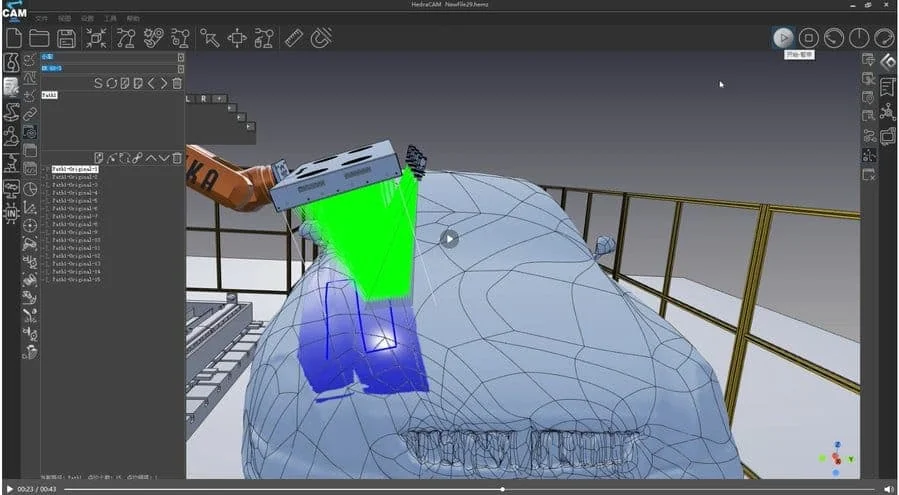
车身薄膜质量检测
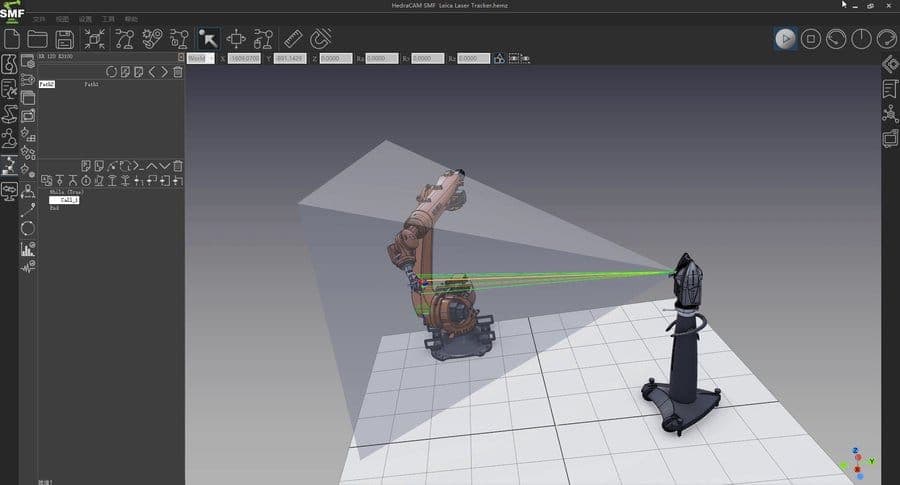
Leica激光跟踪仪