HedraCAM V3.3 builds upon V3.2 with performance enhancements, usability improvements, and bug fixes, while focusing on new features and iterations for offline programming and intelligent programming. It adds several important functional modules including automatic point cloud comparison, galvanometer flying welding, and FANUC NC virtual machine.
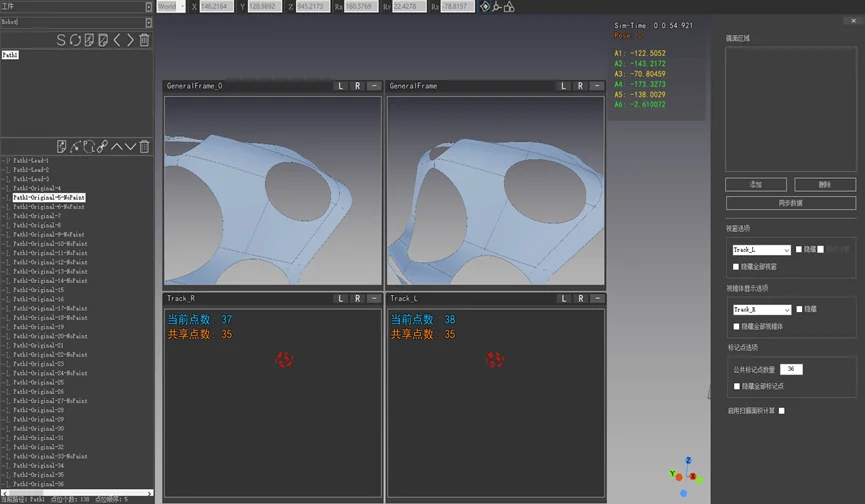
1. Robot OLP offline programming — Scanning process package adds marker point capture function
The reflective marker point capture function can simulate the process of a tracker capturing marker points during measurement, and automatically determine whether the measurement data is valid based on the number of captured marker points.
2. Robot OLP offline programming — Polishing process package adds zone-based process strategy function
The zone-based polishing process function allows dividing part areas into different zones, applying different process strategies to generate polishing paths for each zone.
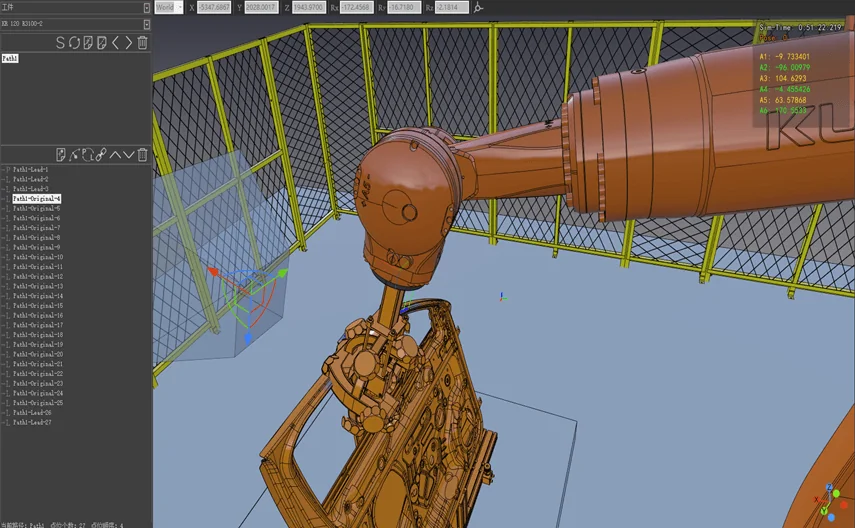
3. Robot OLP offline programming — Algorithm optimization for automatic collision avoidance
The optimization focuses on automatic collision avoidance for the coordination between external axes and robots. Simply set the minimum safety distance between the robot and external axes, and automatic collision avoidance is achieved after simulation calculation.
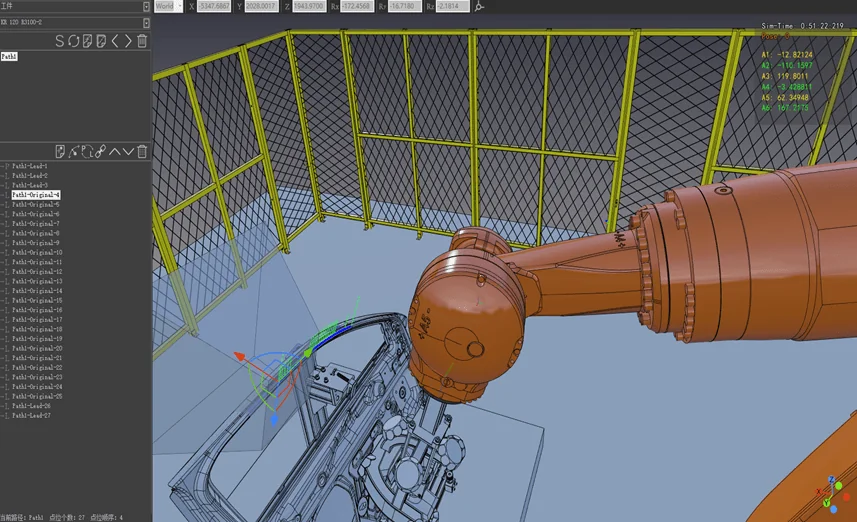
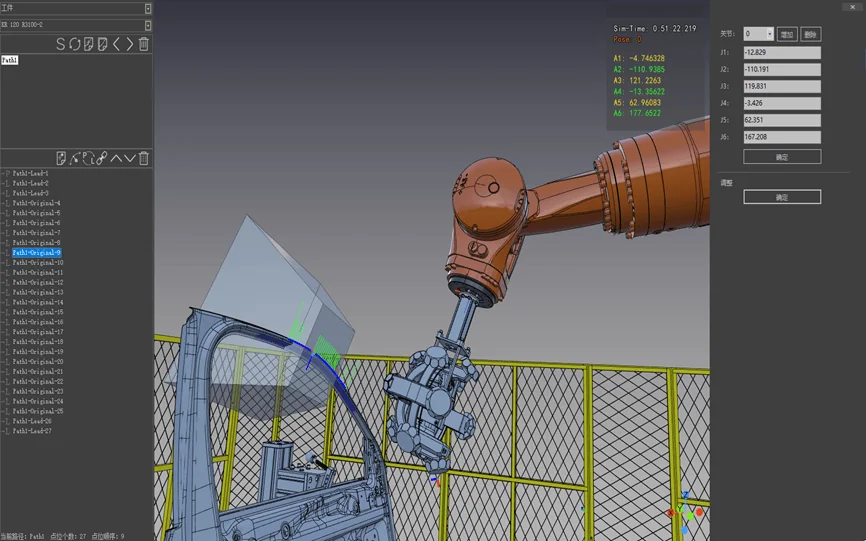
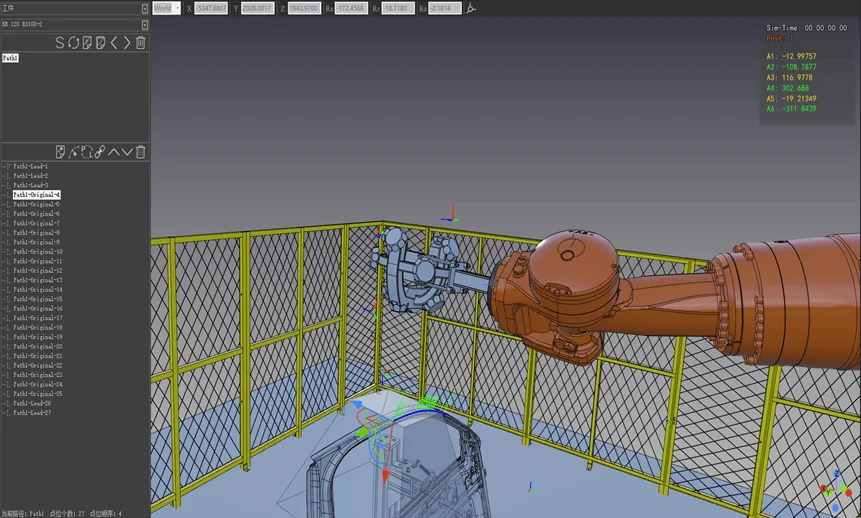
4. Robot OLP offline programming — Adds predefined posture function
The software can predefine multiple robot postures and assign predefined postures to path points as needed.
5. Robot OLP offline programming — Adds galvanometer flying welding process package
The galvanometer flying welding process package can automatically match the robot running speed with the galvanometer welding speed during welding, enabling simultaneous operation. It provides galvanometer trajectory process parameters such as spiral spacing, and after simulation, can output both the robot trajectory program and galvanometer welding program simultaneously.
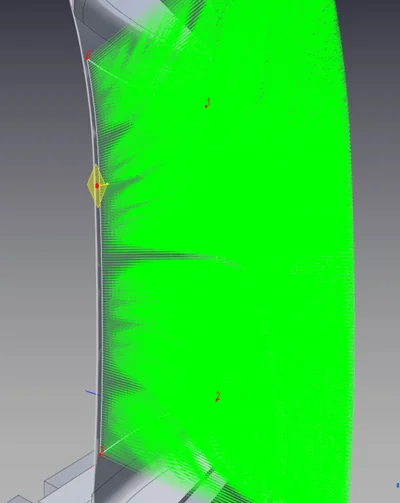
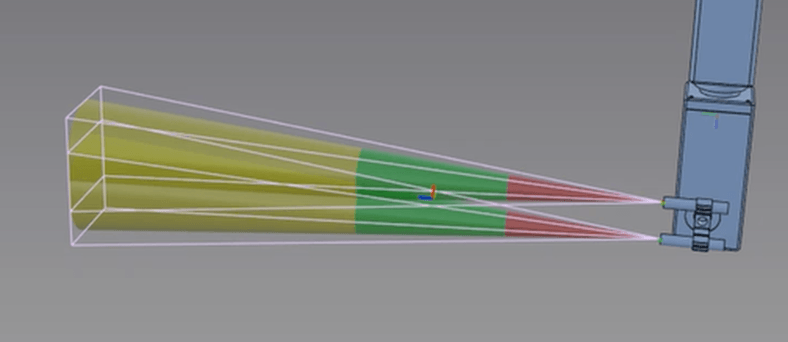
6. Robot OLP offline programming — Sandblasting process package iteration optimization
The sandblasting process package adds a spraying preview function, adding virtual light columns and rectangles at the end of the spray gun to show the spraying coverage area. The spray coloring effect has also been adjusted to three standard colors (red, green, yellow) based on actual production requirements.
7. Pentacut 5-axis offline programming — Adds direct connection with FANUC NC controller and virtual machine, plus reverse NC import function
HedraCAM can directly connect to FANUC NC controllers for virtual commissioning and digital twin simulation, obtaining teach pendant values in real-time and displaying the current program execution position during simulation for automatic collision detection.

8. Pentacut 5-axis offline programming — Adds post-processors for multiple 5-axis machine tools including Sangu (PRIMA), Jiguang glue dispensing, Yuchen water-guided, Senfeng 5-axis, and Haitian 5-axis.
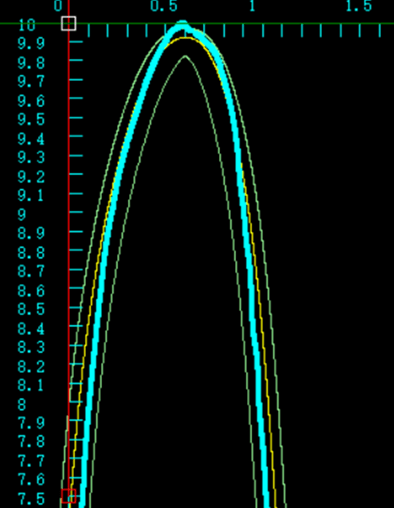
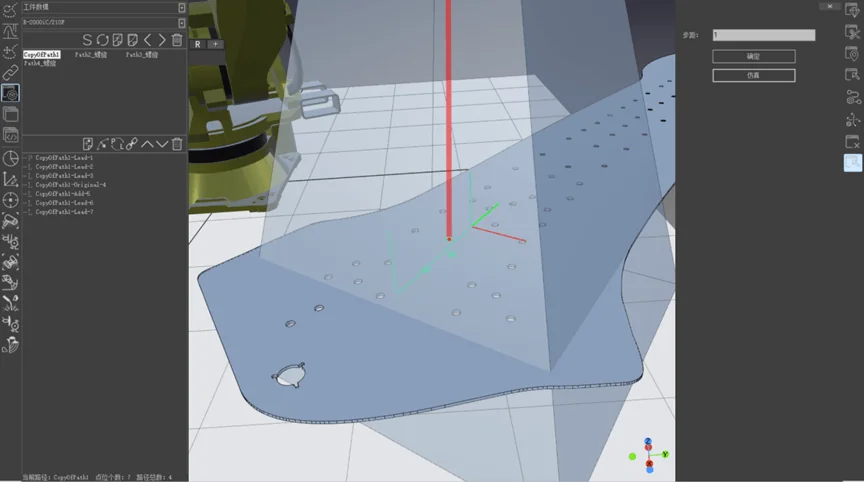
9. AI IN intelligent programming — Adds automatic point cloud comparison module
The automatic point cloud comparison module obtains actual workpiece profile data through cameras, profilometers, or scanners. After comparing with theoretical data, the software automatically generates new machining trajectories. This detection-comparison-machining cycle repeats until the product meets process requirements, with automatic programming and no human intervention.