很多客户到我公司交流,经常会问我怎么会研发两个软件,一个写的是三维离线编程,另外一个写的是生产系统仿真,离线编程和生产系统仿真技术上到底有何区别?很多资深的行业从业者也不清楚两者的区别何在。
按照CIMDATA的定义,两种软件都属于 PLM(product lifecycle management)产品生命周期管理范畴,CAX软件类(产品创新的工具类软件,包含CAD\CAM\CAE)
CAD计算机辅助设计(Computer Aided Design)是CAX类软件的基础和平台,
离线编程属于CAM计算机辅助制造 (computer Aided Manufacturing),而生产系统仿真属于CAE工程设计中的计算机辅助工程(Computer Aided Engineering)。
在工业机器人领域,CAD软件通常用来做三维造型和机械设计,如机器人本体模型和生产系统上的三维模型都是工程师用CAD软件造型的,美国的Solidworks软件(法国达索收购)价格上属于中端CAD软件,在机械参数化设计上很有特色,易学易用,所以在机器人行业目前一枝独秀,基本垄断了中国的本体和集成商三维设计市场。
机器人做加工需要进行轨迹的规划,一般比较简单的加工轨迹用机器人本体自带的示教器即可完成,对于复杂三维轨迹点靠人手工无法完成的,才需要CAM离线编程软件介入,CAM软件要调用零件的三维CAD模型进行轨迹的规划,然后用仿真模组对产生的轨迹点进行虚拟验证,判断是否有碰撞,关节柔顺等合理性,不好的再通过软件工具进行调整,验证调整完成后通过指定品牌的机器人后置处理器,把轨迹点和工艺点同时输出给指定的机器人进行加工。因为工艺的不同,CAM软件行业分的很细,铣削/打磨/抛光/切割/平板焊接/相贯线焊接/3D打印等加工方式的工艺和轨迹产生方式完全不同,这就是为什么市场上的CAM软件多于牛毛,没有哪个软件能通吃。在国外很多公司就几个人到十几个人,找准一个细分领域和一个好的CAD/CAM平台,做一款针对细分行业的CAM软件,然后慢慢积累经验,形成技术壁垒。
离线编程这块用到的技术主要是图形学,机器人运动学,路径规划,运动控制等,总体技术难度其实不大,国内做类似产品我查询了一下有十几家,但为什么还是国外软件占主流,国产软件始终无法突破企业市场,主要的问题还是牵涉到工业应用,对软件要求稳定高易学易用,需要适合各种复杂环境。如同CNC控制系统市场一样,技术门槛已经不高国产也很多,但市场还是FANUC,西门子的天下。
针对这种情况,我公司从2009年做自主CAM研发时就避开主流机器人市场,而是针对更细分的5轴激光切割市场开发相应的离线编程软件Peps Pentacut,(已经更名为HedraCAM Pentacut)慢慢积累了10年下来,这个软件目前基本垄断了国内5轴机加工市场并出口韩国,日本和台湾等地。
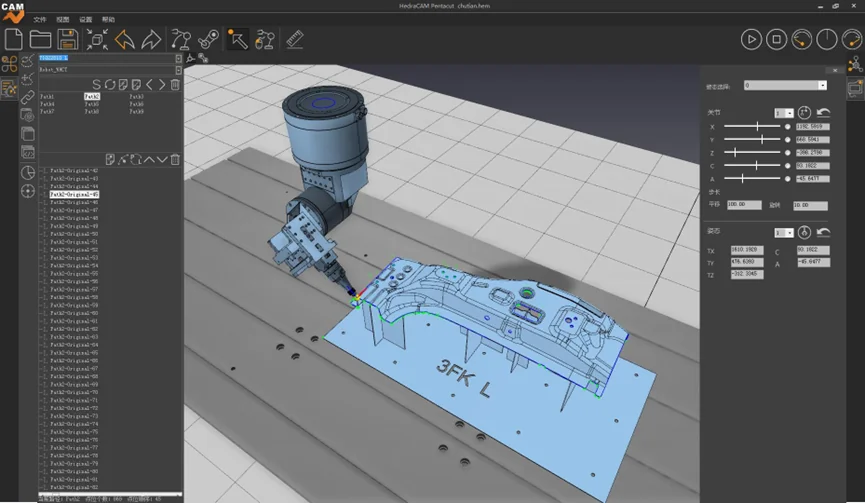
HedraCAM Pentacut 5轴激光切割离线编程软件
在这个基础上2014年再研发针对通用机器人行业的HedraCAM软件,还是围绕切割,板材焊接,相贯线焊接,激光融覆和增材制造等激光和钣金领域,目前这个软件在企业开始推广,客户反馈良好。
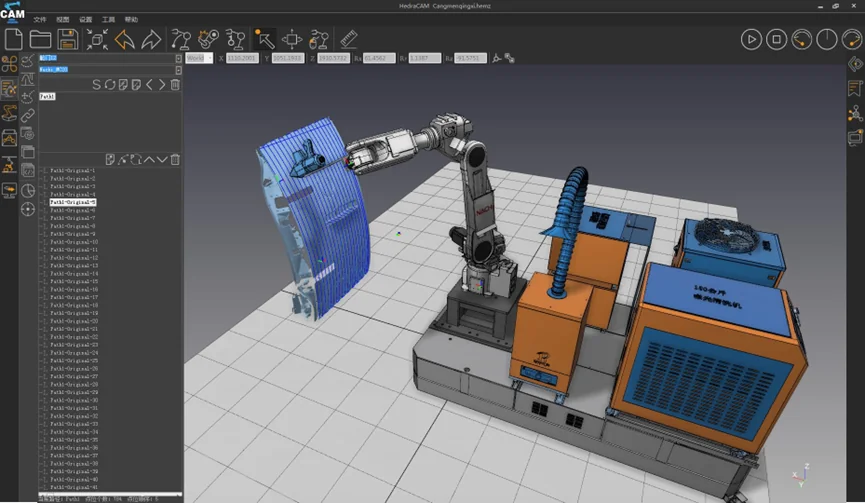
HedraCAM Robot机器人三维离线编程软件
除了HedraCAM外,目前中国机器人行业其它几个主流的三维离线编程软件还有:
1. 加拿大的Robotmaster,早期是基于三维铣削的老牌离线编程软件Mastercam二次开发,因为mastercam的方向是三维铣削,所以robotmaster在机器人铣削上一直很强大,但局限性也非常明显,所以前两年他们放弃了mastercam改用达索的Catia CAD平台,想在其它加工领域也有所突破,但付出的代价巨大,新的版本价格提升,稳定性下降,国外客户评价不高,目前在国外推广阻力很大;
2. 俄罗斯的SprutCAM,这款软件前两年才引进中国,代理商推广的势头比较猛,因为采用低价策略,现在已经部署了一些客户,软件整体评测上俄罗斯在算法上有些特色,但在整体软件设计,稳定性,工艺应用,技术先进性上差强人意,这个主要原因是俄罗斯现在的工业比较落后,没有太多的机器人测试环境有关;
3. RobotDK ,这也是来自加拿大的软件,这款软件不是商业软件,算法和工艺都没有大量验证,目前企业应用比较少,主要是做教育市场;
4. RobotArt,这款软件是基于北航CAXA平台开发的,早期模仿以色列的robotwoks(基于Solidworks平台开发,公司已经倒闭),跟RobotDK一样,这款软件一直在职业教育市场推广,如同CAXA一样始终无法突破企业市场,原因前面已经讲过;
5. 国外还有DELCAM (在铣削基础上增加了机器人模块,已经被AUTOCAD收购),德国FASTCURVE(基于Delmia二次开发)等软件,因价格比较昂贵,在国内没有大规模推广。
在离线编程过程中,需要仿真模块进行验证合理性,这种仿真环境一般就是建立一个跟实际一样的虚拟机器人单元,对单元里面的机器人的加工轨迹进行分析。我们的机器人生产系统仿真HedraCAM SMF就是从HedraCAM离线编程研发过程中的仿真模块发展而来。
早期工业机器人大量都是单元应用,所以仿真主要是对离线编程的轨迹进行合理性分析,随着PLC等自动化技术的发展,大量工厂把机器人单元联合在一起,用物流系统进行连接,相应对软件的需求也有所改变。在自动化生产系统规划过程中,通常用3D CAD软件进行三维设计,然后把模型转到CAE规划分析软件中,对生产系统上的机器人和机床,传送带,人员等进行位置,节拍,机器人可达性,碰撞,信号控制等等在虚拟环境进行合理性分析,产生节拍数据分析产能和科学的规划方案供工厂规划设计人员进行参考。在CAE规划分析软件中,偶尔也会用到CAM离线编程产生的轨迹。
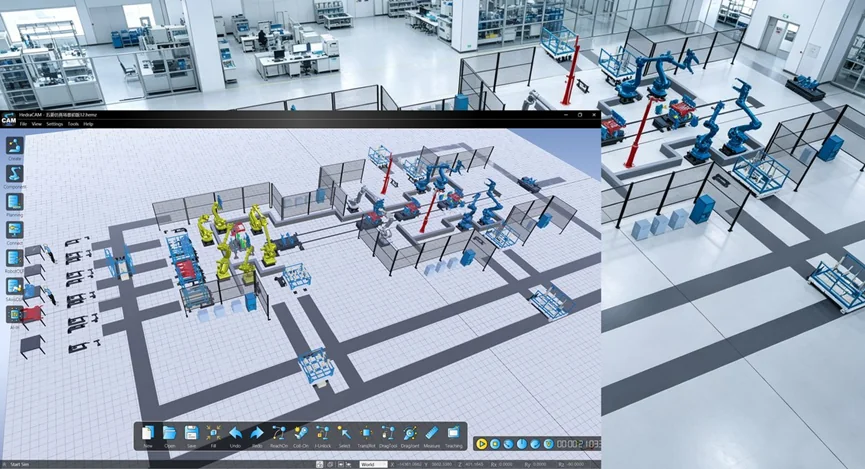
HedraCAM SMF生产系统仿真软件
从用户角度,目前使用三维离线编程软件的大多是工业机器人一线操作技工,来源于中职高职等培养一线技术人才的学校,企业的要求就是尽量提高编程速度和增加机器人的有效工时来提高整体效率,对软件的要求就是尽量傻瓜化,以易用为原则,轨迹规划和仿真分析技术的要求是算法准确,对机器人运动轨迹的效率要求也越来越高。未来离线编程CAM将逐步转变成智能感知的任务自动编程,即机器人通过三维视觉技术采集现场数据,对3D CAD模型产生的轨迹进行自动调整和优化。
机器人行业用CAE仿真软件主要有几个领域,一个是机械设计环节对机械结构的动力学分析;二是生产系统的规划仿真分析,基于离散制造,HedraCAM SMF属于这个领域;三是动态复杂系统的分析,如地形场景这些,应用在服务机器人,交通等领域。
除了HedraCAM SMF外,目前中国机器人行业其它几个主流的生产系统仿真软件还有:
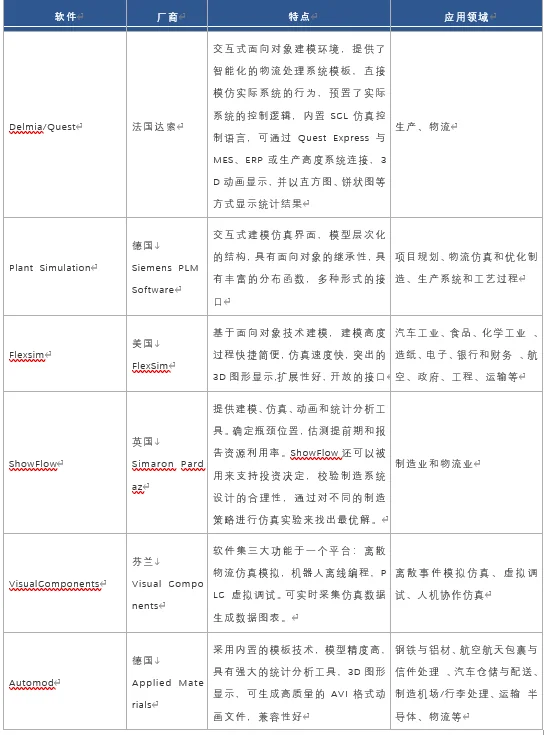
软件 厂商 特点 应用领域
Delmia/Quest 法国达索 交互式面向对象建模环境,提供了智能化的物流处理系统模板,直接模仿实际系统的行为,预置了实际系统的控制逻辑,内置SCL仿真控制语言,可通过Quest Express 与MES、ERP或生产高度系统连接,3D动画显示,并以直方图、饼状图等方式显示统计结果 生产、物流
Plant Simulation 德国
Siemens PLM Software 交互式建模仿真界面,模型层次化的结构,具有面向对象的继承性,具有丰富的分布函数,多种形式的接口 项目规划、物流仿真和优化制造、生产系统和工艺过程
Flexsim 美国
FlexSim 基于面向对象技术建模,建模高度过程快捷简便,仿真速度快,突出的3D图形显示,扩展性好,开放的接口 汽车工业、食品、化学工业 、造纸、电子、银行和财务 、航空、政府、工程、运输等
ShowFlow 英国
Simaron Pardaz 提供建模、仿真、动画和统计分析工具。确定瓶颈位置,估测提前期和报告资源利用率。ShowFlow还可以被用来支持投资决定,校验制造系统设计的合理性,通过对不同的制造策略进行仿真实验来找出最优解。 制造业和物流业
Stream 日本三井造船 不仅可以当作物流生产线的仿真器使用,而且在单一个机械设备的仿真方面也可以用来变通使用,机器人仿真器很齐备;其开发基础是Sil-Tools ,在扩展性和技术支持方面令人担忧。 生产线、物流、机器人
VisualComponents 芬兰
Visual Components 软件集三大功能于一个平台:离散物流仿真模拟,机器人离线编程,PLC 虚拟调试。可实时采集仿真数据生成数据图表。 离散事件模拟仿真、虚拟调试、人机协作仿真
Automod 德国
Applied Materials 采用内置的模板技术,模型精度高,具有强大的统计分析工具,3D图形显示,可生成高质量的AVI格式动画文件,兼容性好 钢铁与铝材、航空航天包裹与信件处理 、汽车仓储与配送、制造机场/行李处理、运输 半导体、物流等
使用生产系统规划仿真软件的大多是CAD机械设计类工程师背景,在大学里面有工业工程,自动化这些专业进行培养,就业方向大多是机器人本体企业和集成商的方案设计规划,大型制造企业的设计部门,对软件的要求通常是提供大量组件数据库以便能快速搭建出生产系统,对各种机器人的运动控制算法要比较精确,能有各种传感器与PLC的模拟器,可以进行场景渲染,输出准确的节拍数据和仿真场景动画。未来生产系统仿真这块技术会集成数字孪生和实时数据驱动等技术,数字孪生即实际的世界有什么物理特征,虚拟世界就有同样特征,虚拟和实际实时通讯,实际的任何变化也会在虚拟世界动态改变,虚拟仿真是人工智能全面介入人类生产和生活必备的基础技术。
总之,在机器人行业三维离线编程CAM软件与生产系统仿真CAE软件技术层面是你中有我,我中有你,应用层面和侧重点则有很大不同。
最后谈一下机器人本体厂商捆绑的软件,如ABB的RobotStudio安川的motosim,kuka的simpro,发那科的robguide,这些软件大多是第三方软件公司为机器人本体厂商贴牌开发,如,kuka的simpro就来自芬兰的Visual Components,严格来讲这些软件都不属于三维离线编程软件,属于生产系统仿真软件的简化版,提供一些简单的离线编程和生产系统仿真功能,主要供下游的集成商做方案用于销售,最终客户如果需要针对复杂的三维零件离线编程或者车间的生产仿真规划仿真分析,建议还是购买专业软件为宜。