当下,软件正在吞噬世界,也在颠覆制造业的生产模式和产品形态,随着工业的转型,越来越多的制造企业开始利用工业软件进行产品功能的创新,以柔性生产推动企业向智能制造转型。
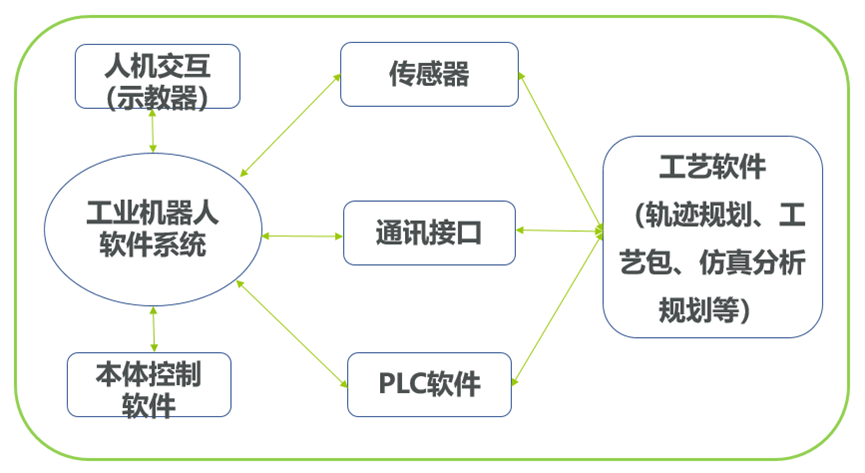
工业机器人软件系统是智能制造的核心技术,工业机器人软件组成如下图,其中轨迹规划和仿真CAM软件又是最关键的一项技术。
机器人轨迹规划的发展史:
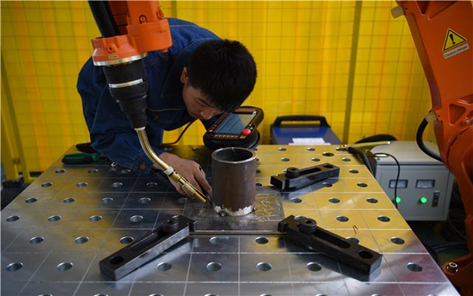
第一代 – 手工示教编程(1960s –至今)
手工示教编程是由工业机器人的运动控制器的内置软件完成,就是人拿着示教器通过肉眼判断,手工取点把点位记录下来获得加工轨迹,这是非常普遍的一种编程方式,占比约为70%,优点是比较方便,所见即所得,非常适合简单的点位加工,但缺点也比较明显:
*示教编程过程繁琐;
*精度完全是靠示教者的目测决定,而且对于复杂的路径示教编程难以取得令人满意的效果;
*示教过程容易发生事故,轻则撞坏设备,重则撞伤人;
*示教器种类太多,学习量太大;
*占用了机器人有效工时,效率及低;
*很多机器人应用的环境非常恶劣,不适合人在现场进行示教编程。
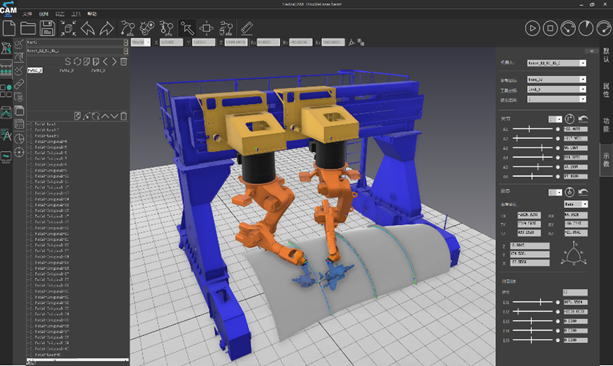
第二代– 三维离线编程 (1990s-至今)
三维离线编程是利用3D CAD图形建立起机器人及其工作环境的三维场景,再利用一些规划算法,通过对加工产品三维图形的控制和操作,在计算机上进行轨迹规划,对编程结果进行三维虚拟仿真,检验编程指令的正确性,最后用后置处理器将生成的代码传到机器人控制器,完成计划任务。
机器人离线编程软件在国外有30多年的发展历史,相关的商业化产品主要分为两类:一类国外大的机器人制造商开发,如ABB的RobotStudio、发那科的RobotGuide、安川的Motosim和KUKA的SimPro等;第二类是国外专业CAD\CAM软件公司开发的第三方软件,如西门子的Tecnomatix、达索的DELMIA IGRIP、Robotmaster和Fastsuite等。国内机器人离线编程企业市场多年来一直被国外产品完全垄断,目前已成熟商业化在企业大量推广应用的唯一国产软件是我公司的HedraCAM Robot OLP软件。
目前离线编程软件在国内推广并不是很理想,已经使用的客户普遍应用效果不好,废弃的很多,新的客户购买意愿不强,主要原因是国内外软件普遍存在的三大共性问题:
*离线编程对应用环境要求高,导致编制的程序缺乏自适应能力
*智能化程度弱,效率还是偏低
*需要招聘专业的CAM编程工程师,成本太高。
第三代 – 智能化、AI自动编程 (2019s – 现今 )
川思特软件通过多年研发,依托HedraCAM OLP基础技术,采用“前端外部数据快速处理+后端强化学习”的组合方案,开发了第三代基于AI的智能编程仿真解决方案HedraCAM AI In,实现无人工干预的机器人免示教三维作业程序的生成,智能编程主要针对小批量或单件生产方式,目前通过各种落地项目已研发出多种不同解决方案,区别是获取数据方式的硬件不同以及对应的工艺流程和针对的行业产品不同。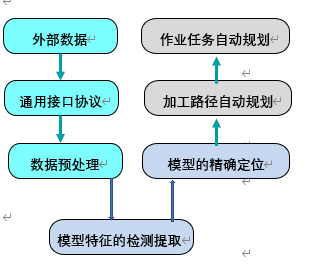
具体步骤如下:
第一步 前端外部数据:
外部数据包含3D CAD(如NX、Solidworks、Tekla、Revit等)输出的3D CAD文件、json焊缝文件或者通过雷达、双目视觉相机、三维扫描设备、手持式示教笔、遥操作手柄等获得的各种外部数据(如点云文件txt、stl网格等);
第二步 数据快速处理与定位:
通过对扫描数据的分类处理、快速识别、提取和匹配与实际喷丸工艺流程密切相关的工件加工特征(点、线、面、体等通用几何特征),实现对零件的标记和精确定位;
第三步 AI智能处理:
加工路径的自动规划主要考虑加工轨迹点的自动化生成、机器人姿态变化最小、超限和歧义位置、避障、外部轴等因素,通过AI强化学习寻找到机器人及外部轴的最佳姿态并通过仿真环境进行自动避障训练;
第四步:后端通讯:
通过考虑了加工工艺参数设置的后置处理及和本体控制器的互联互通数字孪生技术,输出加工程序到机器人端进行自动化加工。
HedraCAM AI In软件系统可以实现无人干预自动运行,技术人员按一个Start键启动即可自动完成所有任务,处理过程中也可以随时暂停进行手工修改参数,系统编制一个零件后程序可以自动循环执行编制第二个零件…..,特别适合大批次的单件自动化生产,能实现24小时无人干预的“黑灯工厂”循环生产方式,使得企业生产效率大幅提高。
HedraCAM AI In软件系统目前已经在切割、焊接、喷涂、装配、上下料、抛磨等多个领域成功落地实施。