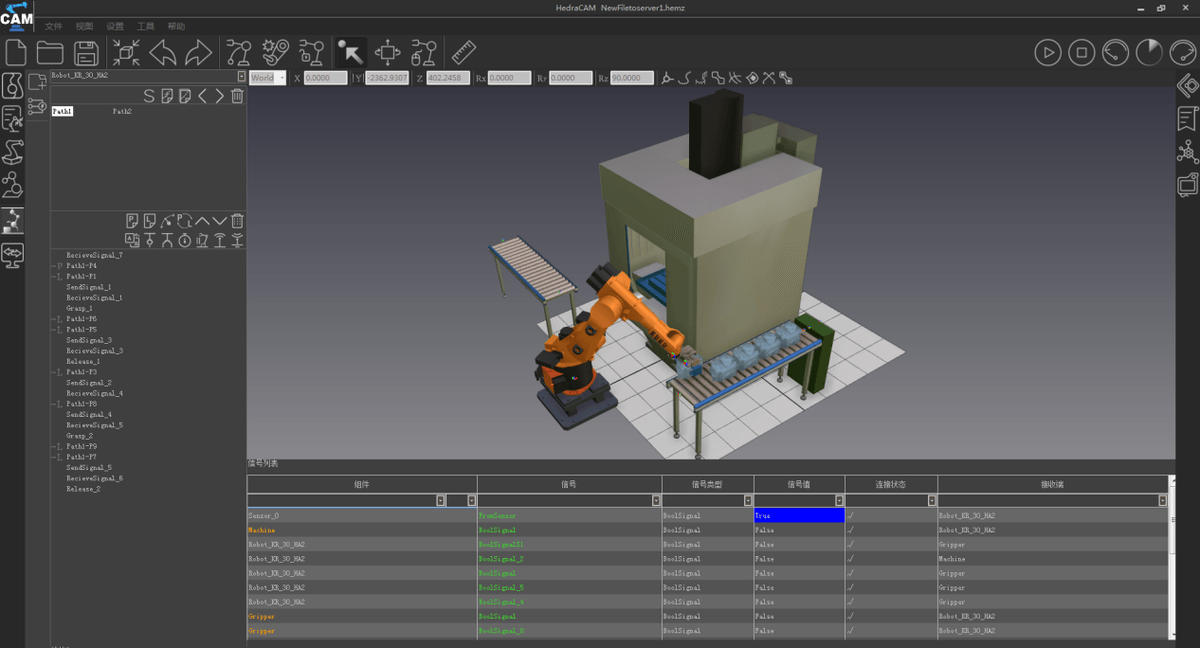
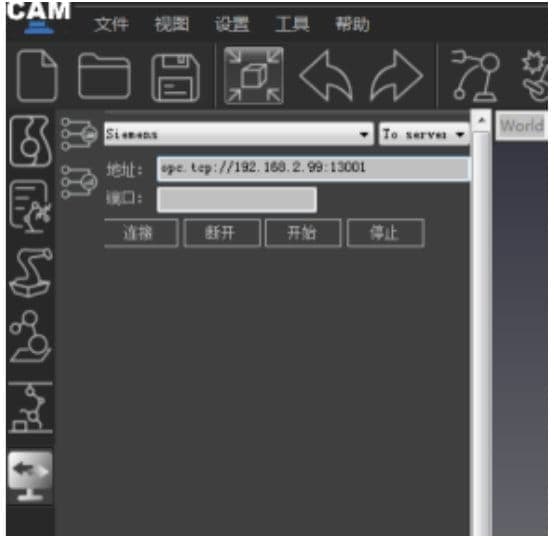
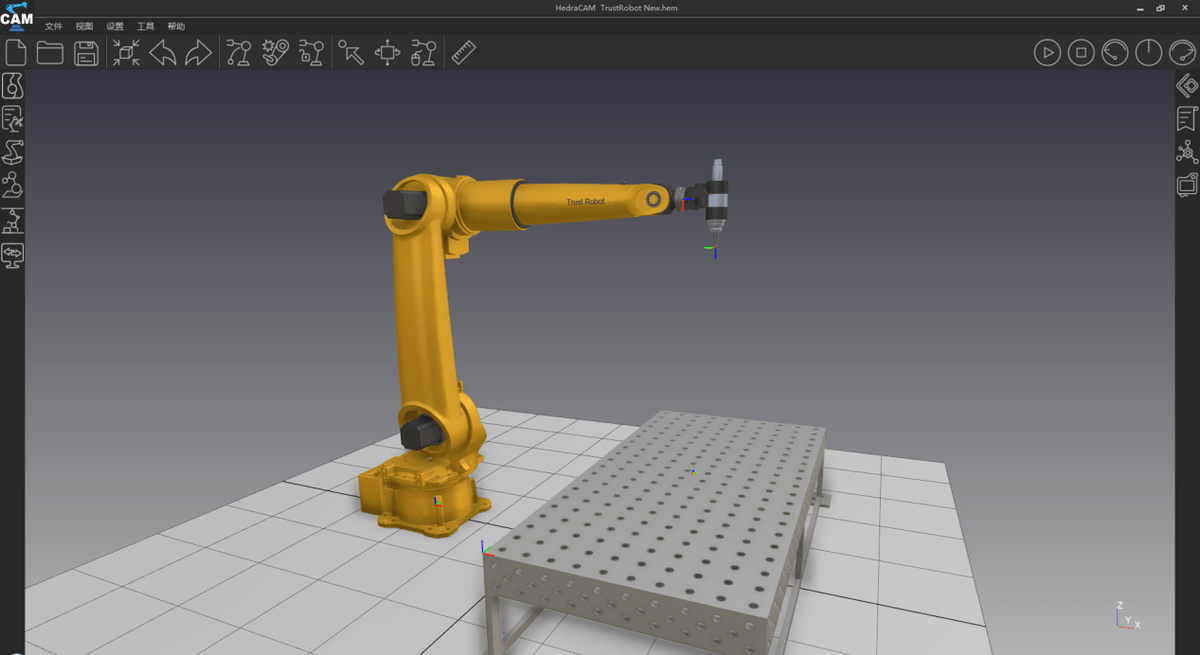
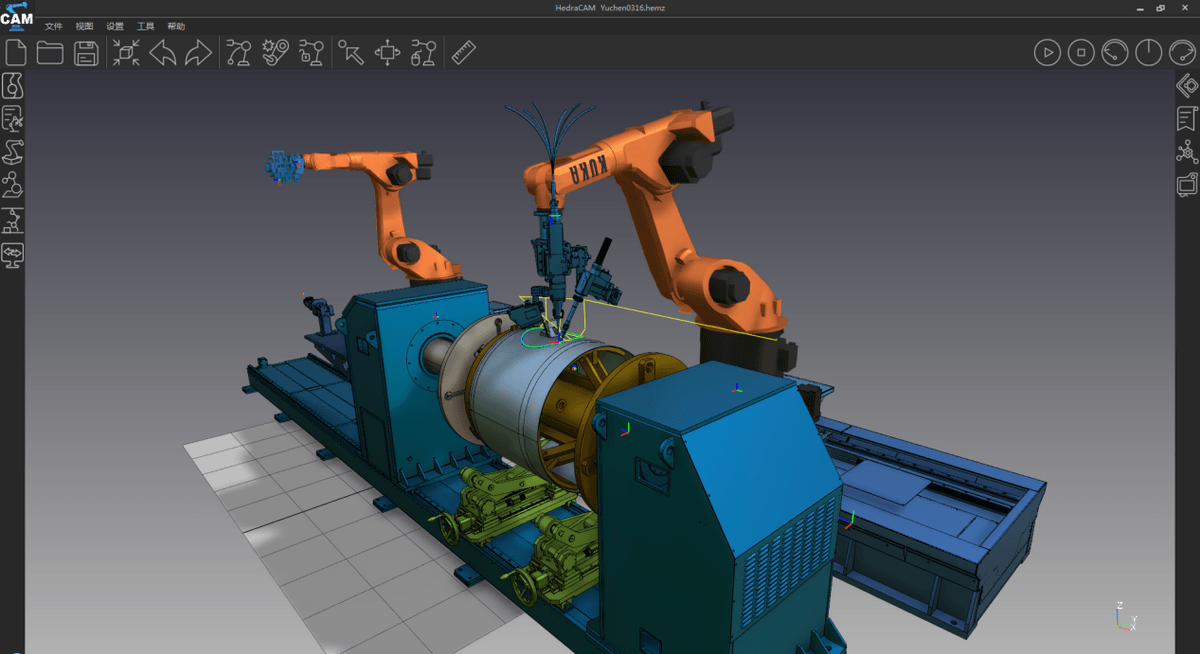
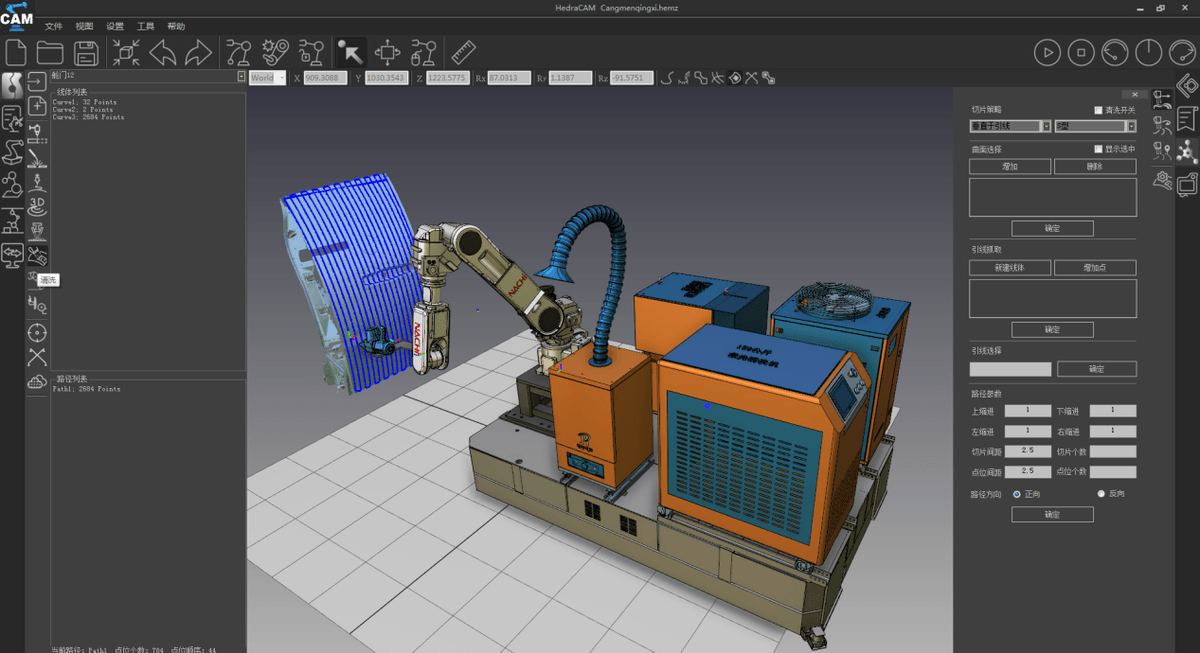
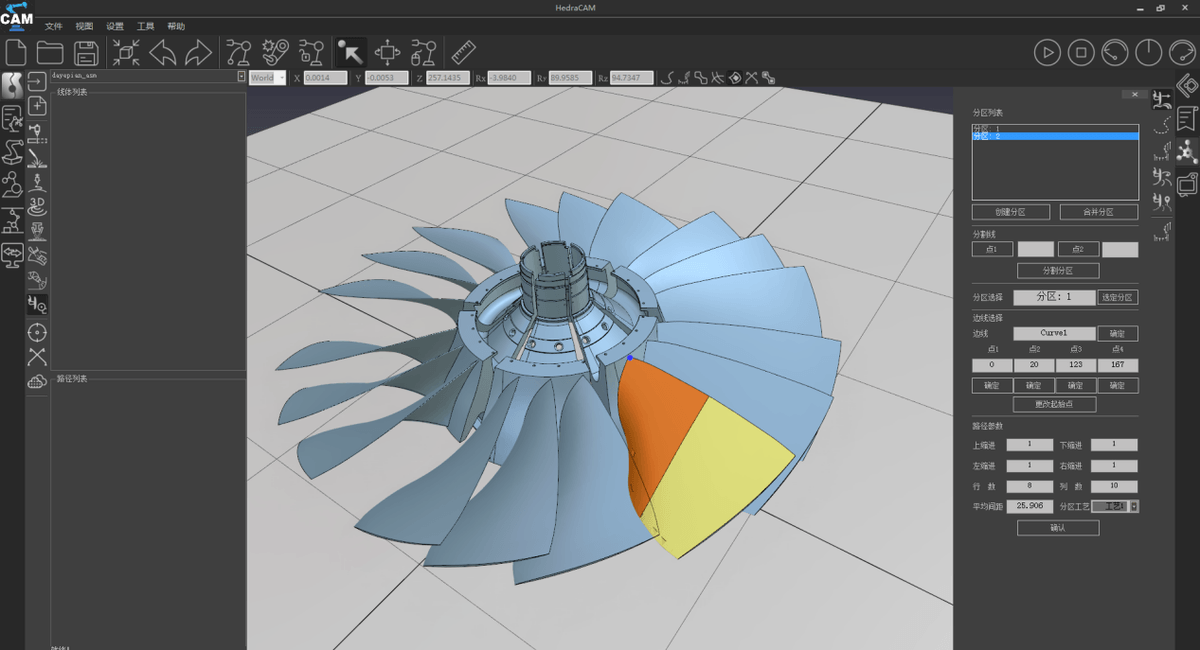
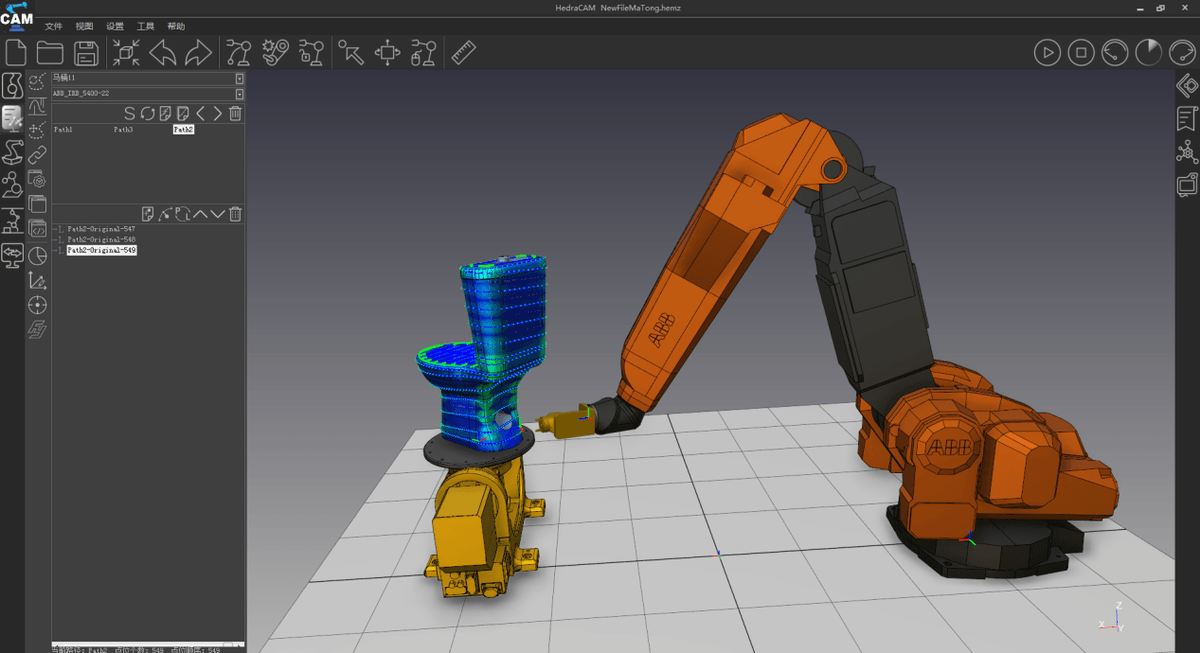
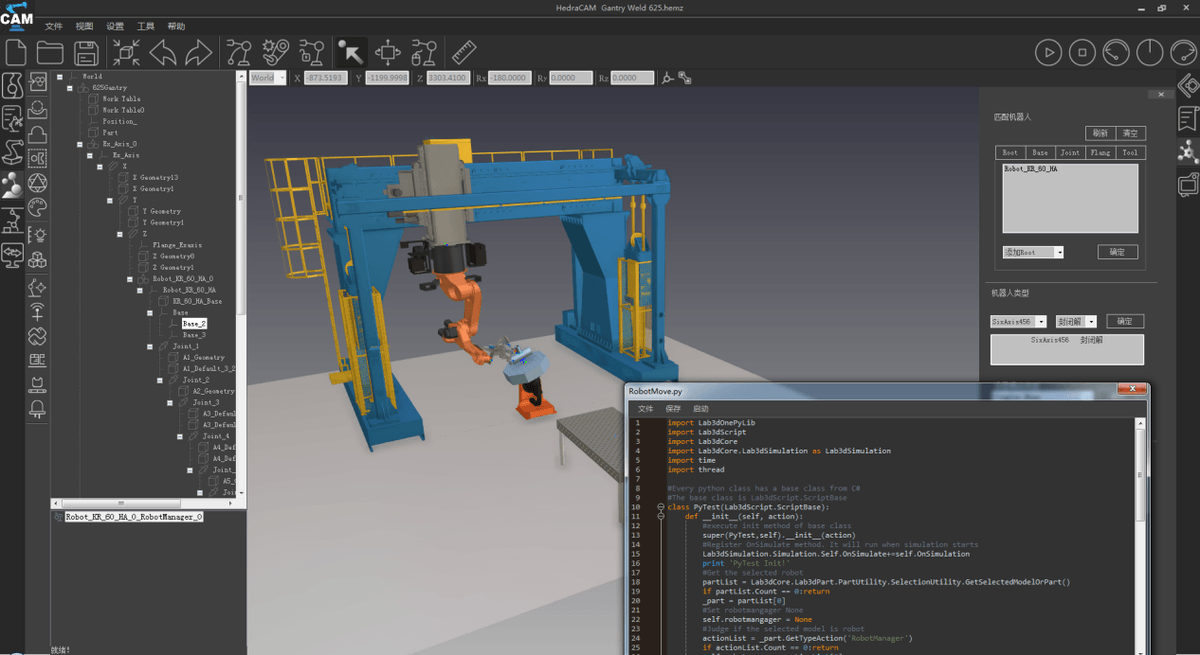
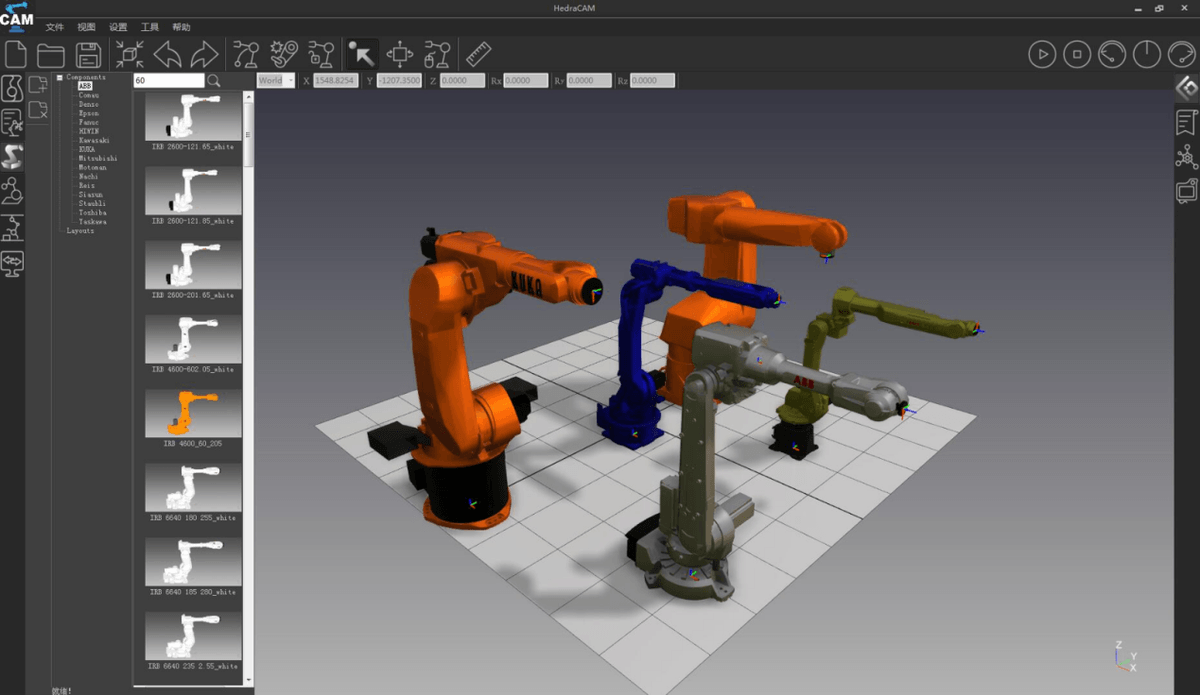
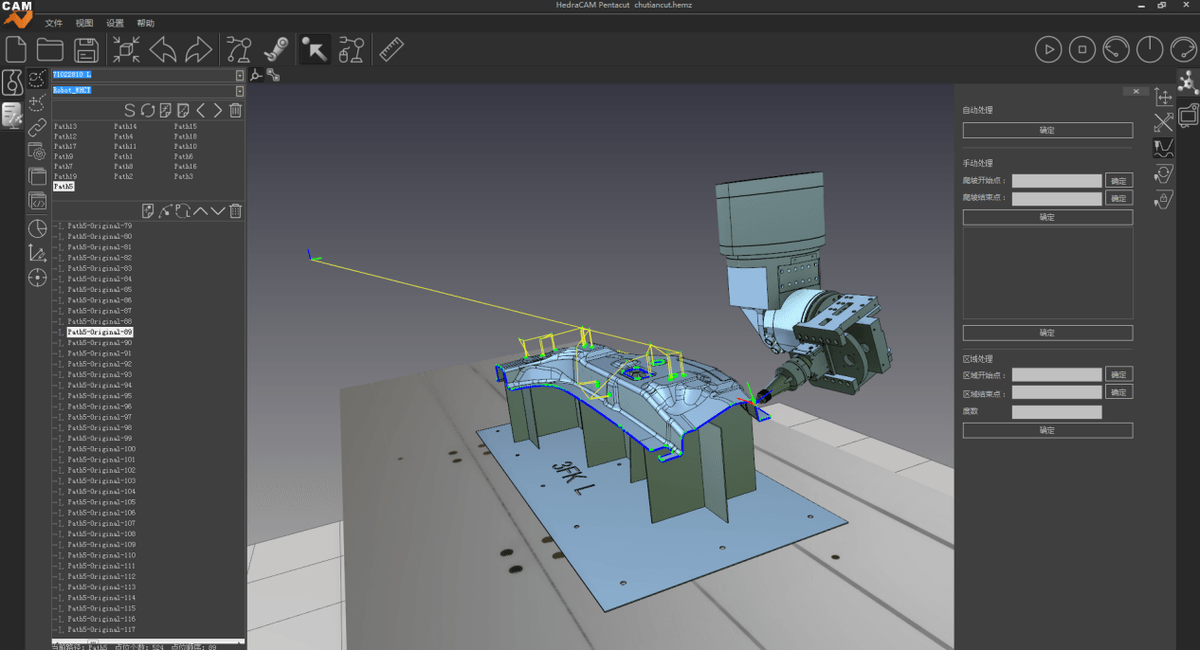
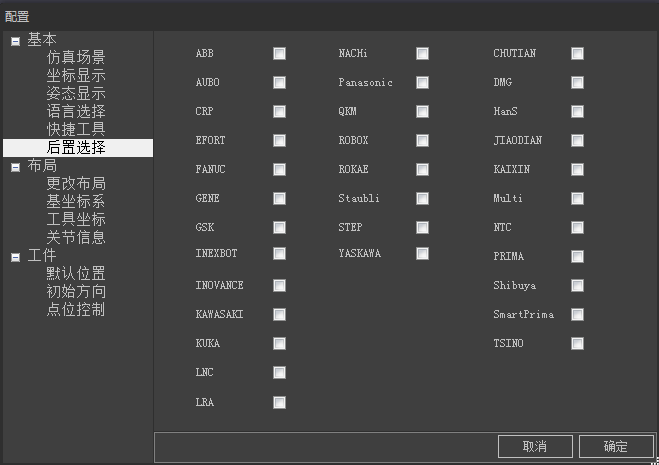
HedraCAM is a professional offline programming and production line simulation platform for the robotics industry. As China's first commercial enterprise-level CAM software in the robotics industry, it has undergone multiple version updates since its launch in 2015. The new V3.0 version represents a massive upgrade and iteration of the software, achieving a qualitative leap. V3.0 is the first version to integrate multiple products into a single platform, including production line planning simulation, robot offline programming, 5-axis machine offline programming, PLC virtual commissioning simulation, and robot digital twin. Models and machining data can be shared across all modules. V3.0 adds two new modules as follows: 1. New production line planning and analysis module, providing point programming and IO signal control, while adding sensor simulation modeling functions to the modeling features. Supports production line planning and digital twin simulation. 2. New remote debugging module, supporting communication connections with OPC UA standard. Through interaction with PLC programming software such as CoDeSys and Siemens TIA Portal, as well as controllers from domestic and international brands including ABB, KUKA, Nabot, Googol, and Aobo, it enables virtual commissioning and digital twin control of real robot workstations and production lines. V3.0 new features include: 1. Interface optimization - adding various user-friendly tools and optimizing the product interface based on customer usability principles, minimizing unnecessary menus and icons to reduce customer learning difficulty. 2. Brand new rendering simulation engine - first to adopt physically based rendering (PBR) materials, with post-processing global illumination system and GPU-accelerated rendering pipeline. Dynamic adjustment of model metallicity and roughness, real-time global shadows and projected texture technology. 3. Process reorganization for 3D cutting, sheet metal welding, pipe welding, cladding, 3D printing, shot peening, cleaning, spray glazing, polishing, needling, repair and other processes. 4. New curved surface machining area partitioning function, replacing the previous method of selecting different surfaces to define machining areas, allowing different areas to use different machining processes. 5. New analysis functions for additive and subtractive machining effects including spraying, cleaning, polishing, and 3D printing. 6. All modeling features opened, with both parametric and Python scripting modeling methods provided. 7. Model library added over 1000 robot models. 8. New physics engine for more realistic simulation of real-world scenarios. 9. New automatic trajectory optimization function for 5-axis machine machining. 10. Added 10 new post-processors, including 3 for 5-axis machines and 7 for domestic robot brands.